Ce contrôleur n'est plus disponible, Vous pouvez toujours modifier des objets qui ont été attribués à ce contrôleur dans les versions antérieures.
Le contrôleur de rotation Euler local est similaire au contrôleur de rotation Euler XYZ, mais les angles dépendent du système de coordonnées locales de l'objet à faire pivoter. Avec le contrôleur de rotation Euler standard, les angles dépendent des coordonnées parentes. Les paramètres de ce contrôleur s'affichent dans le groupe de fonctions Mouvement.
Le contrôleur de rotation Euler local XYZ comporte trois pistes de rotation pour contrôler la rotation sur les axes X, Y et Z. La définition d'une clé de rotation sur l'axe des X ne crée pas de clés dans les pistes Y et Z de la même image ; chaque piste peut recevoir des clés de façon indépendante. L'ordre de rotation des axes est défini dans le groupe de fonctions Mouvement.
Interface
Les paramètres Euler locaux s'affichent dans le groupe de fonctions Mouvement.
Panneau déroulant Paramètres Euler
Ce panneau déroulant apparaît lorsque la rotation est sélectionnée dans le panneau déroulant Paramètres PRE.
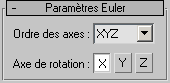
- Ordre des axes
-
Définit l'ordre de calcul des rotations dans la liste. L'ordre par défaut est X, Y, Z, l'axe des X étant le premier à subir la rotation.
- X
-
Affiche les propriétés du contrôleur pour l'angle de rotation de l'axe des X.
- Y
-
Affiche les propriétés du contrôleur pour l'angle de rotation de l'axe des Y.
- Z
-
Affiche les propriétés du contrôleur pour l'angle de rotation de l'axe des Z.
Chaque axe utilise son propre contrôleur indépendant en utilisant le type de données Flottant. Par exemple, les axes de rotation des X et des Y peuvent utiliser des contrôleurs Flott. Bézier, tandis que l'axe de rotation des Z utilise un contrôleur Flott. bruit.