Pour configurer la configuration non linéaire pour une analyse statique non linéaire ou de réponse transitoire, cliquez avec le bouton droit sur Configuration non linéaire sous votre sous-cas dans l'arborescence, puis sélectionnez Modifier.
Analyse statique non linéaire ou de réponse transitoire
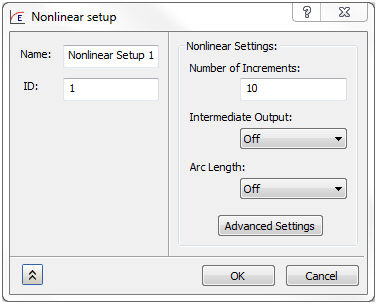
Nom : utilisé pour étiqueter une configuration non linéaire.
ID : utilisé pour identifier une configuration non linéaire numériquement.
Paramètres non linéaires :
- Nombre d'incréments : le nombre d'incréments pour une analyse non linéaire est entré ici. Le solveur doit diviser la charge totale en ce nombre d'incréments. Il ne doit pas être confondu avec une itération. L'algorithme de solution non linéaire peut prendre plusieurs itérations pour résoudre un incrément.
-
Résultats intermédiaires :
- Actif : indique que le résultat intermédiaire (le résultat à enregistrer à chaque incrément convergé) doit être enregistré.
- Inactif : aucun résultat intermédiaire ne sera enregistré.
- Tout : lorsqu'une analyse non linéaire coupe l'incrément de charge actuel, l'incrément de charge coupé peut se terminer et, par conséquent, enregistrera un fichier de résultat à cet incrément coupé.
- Longueur de l'arc : permet d'activer/de désactiver et indique l'utilisation des méthodes de longueur d'arc en analysant des problèmes non linéaires snap-through.
- Paramètres avancés : ce bouton permet d'afficher les paramètres avancés pour l'analyse non linéaire. Ce paramètre s'applique aux analyses statiques non linéaires et transitoires non linéaires.
Paramètres statiques non linéaires : il s'agit des remplacements avancés, qui, en général, n'ont pas besoin d'être modifiés, sauf si le modèle a du mal à converger, et que vous êtes à l'aise avec les modifications effectuées.
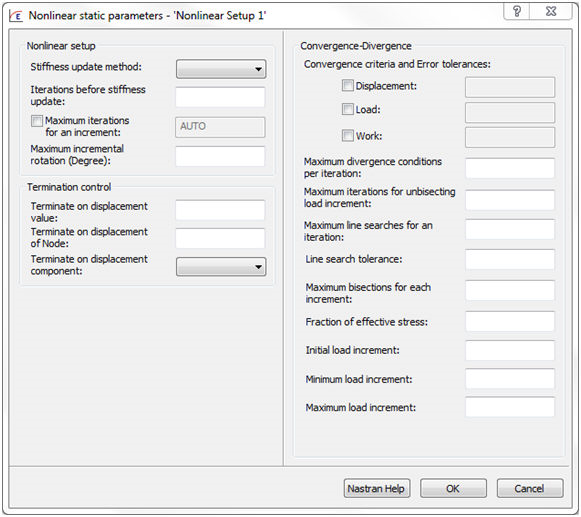
Analyse statique non linéaire
-
Configuration non linéaire :
- Méthode de mise à jour de rigidité : trois options Automatique, Semi et Itérations
- Auto : le programme sélectionne automatiquement la stratégie la plus efficace en fonction des taux de convergence. A chaque étape, le nombre d'itérations requises à converger est estimé. La rigidité est mise à jour, si (i) l'estimation du nombre d'itérations à converger dépasse MAXITER ou (ii) la solution diverge.
- Semi : le programme pour chaque incrément de la charge (i) effectue une seule itération en fonction de la nouvelle charge, (ii) met à jour la matrice de rigidité, et (iii) reprend les options automatiques normales.
- Itérations : si cette option est sélectionnée, le programme met à jour la matrice de rigidité à chaque itération KSTEP et à la convergence si KSTEP ≤ MAXITER. Cependant, si KSTEP > MAXITER, la matrice de rigidité n'est jamais mise à jour. Notez que la stratégie d'itération de Newton-Raphson est obtenue en sélectionnant l'option Itér et KSTEP = 1, tandis que la stratégie d'itération Newton-Raphson modifiée est obtenue en sélectionnant l'option Itér et KSTEP = MAXITER.
- Itération avant la mise à jour de rigidité : nombre d'itérations avant que la matrice de rigidité soit mise à jour.
- Itérations maximum pour un incrément : nombre maximum d'itérations autorisé pour un incrément.
- Rotation incrémentielle maximum (Degré) : tolérance de rotation maximale. Si ce nombre est atteint, la solution émettra une coupure de charge.
- Méthode de mise à jour de rigidité : trois options Automatique, Semi et Itérations
-
Contrôle de fin :
- Terminer sur la valeur de déplacement : cette valeur est utilisée pour déterminer la limite d'analyse en fonction du déplacement.
- Terminer sur le déplacement du noeud : il s'agit de l'ID de noeud utilisé pour la limite d'analyse en fonction du déplacement.
- Terminer sur le déplacement du composant : il s'agit de la direction de déplacement du composant, dans le système de coordonnées des résultats, du noeud.
-
Convergence-Divergence :
- Critère de convergence et tolérances d'erreurs : les critères utilisés pour déterminer la convergence d'un incrément de charge particulier.
- Déplacement : désigne le déplacement en fonction de critères de convergence.
- Charge : désigne les critères de convergence en fonction de la charge.
- Travail : désigne les critères de convergence en fonction du travail.
- Conditions de divergence maximum par itération : permet de contrôler les critères d'une solution de divergence.
- Itérations maximum pour un incrément de charge non bisectrice : le nombre maximum d'itérations maximal pour un incrément de charge non coupé.
- Recherche de ligne maximum pour une itération : détermine le nombre de recherches de ligne utilisé dans la mise à l'échelle du déplacement pour minimiser l'erreur d'énergie. Cette option fonctionne conjointement avec une tolérance de recherche de ligne.
- Tolérance de recherche de ligne : indique une valeur de tolérance pour la procédure de recherche de ligne. Si la valeur absolue d'énergie relative est inférieure à cette valeur, alors la procédure de recherche de ligne est ignorée.
- Bisections maximum pour chaque incrément : indique le nombre maximal de coupure de charge autorisé avant qu'une erreur fatale se produise et que la solution se termine.
- Fraction de contrainte effective : il s'agit d'une fraction de contrainte effective utilisée pour limiter la taille de sous-incrément pour les matériaux non linéaires.
- Incrément de charge initial/minimum/maximum : il est utilisé pour la méthode d'incrément de charge adaptative/de convergence pour définir l'ensemble les limites supérieure et inférieure de l'incrément de la charge dans le sous-cas. L'incrément de charge initial remplace la valeur définie à l'aide du nombre d'incrément. Ces incréments de charge ne sont pas applicables lorsque des méthodes de longueur d'arc sont spécifiées par le biais d'entrées de données brutes NLPCI.
- Critère de convergence et tolérances d'erreurs : les critères utilisés pour déterminer la convergence d'un incrément de charge particulier.
Paramètres transitoires non linéaires : il s'agit de remplacements avancés, qui, en général, n'ont pas besoin d'être modifiés, sauf si le modèle a du mal à converger, et que vous êtes à l'aise avec les modifications effectuées.
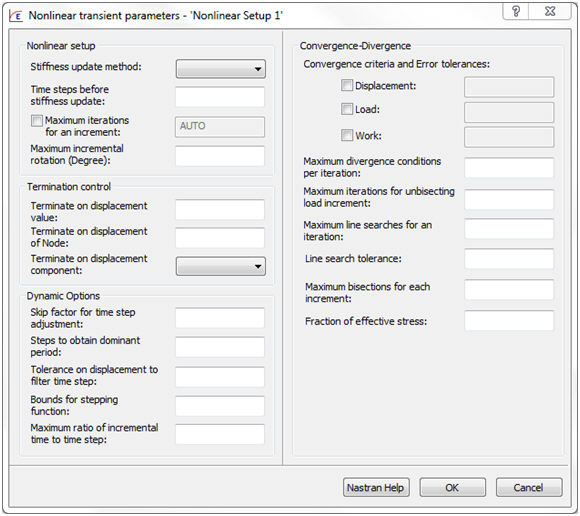
Analyse de réponse transitoire non linéaire
-
Configuration non linéaire :
- Méthode de mise à jour de rigidité : trois options Automatique, Semi et Itérations
- Auto : le programme sélectionne automatiquement la stratégie la plus efficace en fonction des taux de convergence. A chaque étape, le nombre d'itérations requises à converger est estimé. La rigidité est mise à jour, si (i) l'estimation du nombre d'itérations à converger dépasse MAXITER ou (ii) la solution diverge.
- Semi : le programme pour chaque incrément de la charge (i) effectue une seule itération en fonction de la nouvelle charge, (ii) met à jour la matrice de rigidité, et (iii) reprend les options automatiques normales.
- Itérations : si cette option est sélectionnée, le programme met à jour la matrice de rigidité à chaque itération KSTEP et à la convergence si KSTEP ≤ MAXITER. Cependant, si KSTEP > MAXITER, la matrice de rigidité n'est jamais mise à jour. Notez que la stratégie d'itération de Newton-Raphson est obtenue en sélectionnant l'option Itér et KSTEP = 1, tandis que la stratégie d'itération Newton-Raphson modifiée est obtenue en sélectionnant l'option Itér et KSTEP = MAXITER.
- Pas de temps avant la mise à jour de la rigidité : nombre de pas de temps avant de la matrice de rigidité est mis à jour.
- Itérations maximum pour un incrément : nombre maximum d'itérations autorisé pour un incrément.
- Rotation incrémentielle maximum (Degré) : tolérance de rotation maximale. Si ce nombre est atteint, la solution émettra une coupure de charge.
- Méthode de mise à jour de rigidité : trois options Automatique, Semi et Itérations
-
Contrôle de fin :
- Terminer sur la valeur de déplacement : cette valeur est utilisée pour déterminer la limite d'analyse en fonction du déplacement.
- Terminer sur le déplacement du noeud : il s'agit de l'ID de noeud utilisé pour la limite d'analyse en fonction du déplacement.
- Terminer sur le déplacement du composant : il s'agit de la direction de déplacement du composant, dans le système de coordonnées des résultats, du noeud.
-
Options dynamiques :
- Facteur d'omission pour l'ajustement du pas de temps : il s'agit d'un facteur d'omission d'un pas de temps utilisé pour le pas de temps adaptatif.
- Pas pour obtenir une période dominante : permet de déterminer la période dominante d'un modèle d'un pas de temps adaptatif automatique correct.
- Tolérance de déplacement pour filtrer le pas de temps : si le rapport de la vitesse et du déplacement est inférieur à cette valeur, aucun ajustement de pas de temps n'est effectué.
- Limites pour la fonction de mise en pas : utilisée conjointement avec les pas pour déterminer le pas de temps ajusté.
- Rapport maximal du temps incrémentiel au pas de temps : utilisé pour définir les limites supérieure et inférieure pour la taille du pas de temps ajusté.
-
Convergence-Divergence :
- Critère de convergence et tolérances d'erreurs : les critères utilisés pour déterminer la convergence d'un incrément de charge particulier.
- Déplacement : désigne le déplacement en fonction de critères de convergence.
- Charge : désigne les critères de convergence en fonction de la charge.
- Travail : désigne les critères de convergence en fonction du travail.
- Conditions de divergence maximum par itération : permet de contrôler les critères d'une solution de divergence.
- Itérations maximum pour un incrément de charge non bisectrice : le nombre maximum d'itérations maximal pour un incrément de charge non coupé.
- Recherche de ligne maximum pour une itération : détermine le nombre de recherches de ligne utilisé dans la mise à l'échelle du déplacement pour minimiser l'erreur d'énergie. Cette option fonctionne conjointement avec une tolérance de recherche de ligne.
- Tolérance de recherche de ligne : indique une valeur de tolérance pour la procédure de recherche de ligne. Si la valeur absolue d'énergie relative est inférieure à cette valeur, alors la procédure de recherche de ligne est ignorée.
- Bisections maximum pour chaque incrément : indique le nombre maximal de coupure de charge autorisé avant qu'une erreur fatale se produise et que la solution se termine.
- Fraction de contrainte effective : il s'agit d'une fraction de contrainte effective utilisée pour limiter la taille de sous-incrément pour les matériaux non linéaires.
- Critère de convergence et tolérances d'erreurs : les critères utilisés pour déterminer la convergence d'un incrément de charge particulier.