足プラットフォームは足用の IK ターゲットです。そのモーションは脚のアニメーションにとって非常に重要です。
-
[CATMotion エディタ](CATMotion Editor) >
 [階層](Hierarchy)パネル > 足プラットフォームが属するハブ グループ階層を展開 > 編集するコントローラをクリック
[階層](Hierarchy)パネル > 足プラットフォームが属するハブ グループ階層を展開 > 編集するコントローラをクリック
ロール基点位置
足が常に正しいポイントの周りを回転するように、CATRig の足プラットフォームにはアニメートされた基点位置があります。[ロール基点位置](PitchPivotPos)コントローラは、足プラットフォームの X 軸上での基点の位置を決定します(つまり、X 軸の一方の端からもう一方の端)。
値 1.0 は足の外側、値0.0 は足のプラットフォームの内側となります。
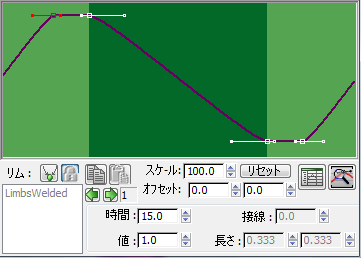
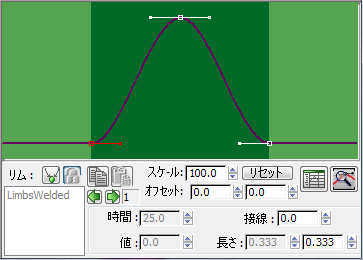
ロール
[ロール](Roll)コントローラは、長さに沿った足プラットフォームの回転を制御します。
次の図では、ロールは足が地面を離れる前に開始して、着地後に終わります。これが一般的なシナリオです。
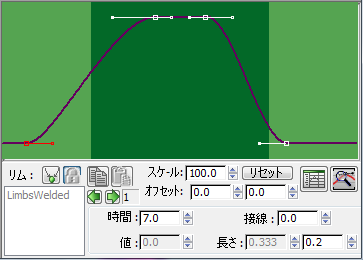
ピッチ基点位置
足が常に希望どおりのポイントの周りを回転するように、足プラットフォームにはアニメートされた基点位置があります。[ピッチ基点位置](PitchPivotPos)は、足プラットフォームの Y 軸(つまり長さ)に沿って基点の位置を制御します。
値 0.0 は基点の位置を足のプラットフォームのかかとに、値 1.0 はつま先に配置します。
人間の場合、この設定は通常、Lift (足上げ)時のつま先(1.0)とPlant(着地)時のかかと(0.0)の間でアニメートします(次の図を参照)。
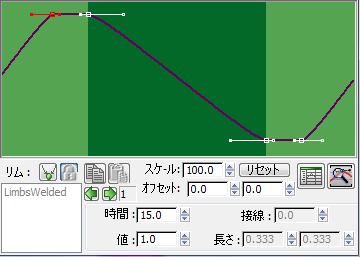
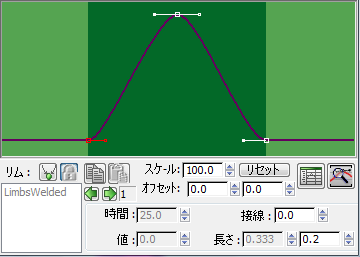
ピッチ
標準の[ピッチ](Pitch)コントローラと同様、足プラットフォームの[ピッチ](Pitch)は、その長さ(Y 軸)に沿って足プラットフォームの角度を制御します。足が地面から離れるときと着地するときの、足の角度の制御に使用します(次の図を参照)。
足プッシュ
[足プッシュ](FootPush)は、Y 軸に沿った周期的な位置のオフセットです。歩行サイクル中に、足プラットフォームを前方に移動させることができます。
スワーブ
[スワーブ](Swerve)コントローラは、実際には[重み移動](WeightShift)コントローラと同じです。足プラットフォームの横から横へ(X 軸)の位置のサイクルを制御します。
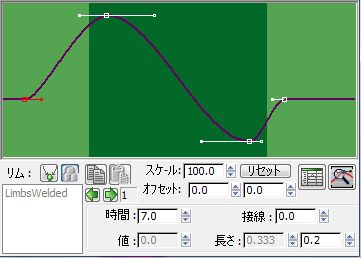
ステップ シェイプ
[ステップ シェイプ](StepShape)コントローラは、足プラットフォームが宙を移動する際の速度を制御します。つまり、足プラットフォームのモーションのイーズ インとイーズ アウトをコントロールします。
