[mParticles スイッチ](mParticles Switch)オペレータを使用し、このオペレータをダイナミック(パーティクル モーションが MassFX シミュレーション エンジンによって制御される)ではなくキネマティック(パーティクル モーションが標準のパーティクル フロー アクションによって制御される)として含むイベントを定義することによって、純粋なシミュレーション アニメーション イベントを調整します。
イベントでパーティクルのグローバル重力を除外したり、標準(mParticles 以外)のパーティクル フロー オペレータを使用することによって位置/速度/回転/スピンを調整することもできます。一致オプションにより、シミュレーションにおけるパーティクルのプロパティを調整できます。この調整操作には制限があります。たとえば、パーティクルどうしが衝突する場合は、パーティクル位置を一致させることができません(オーバーラップの制限)。
インタフェース
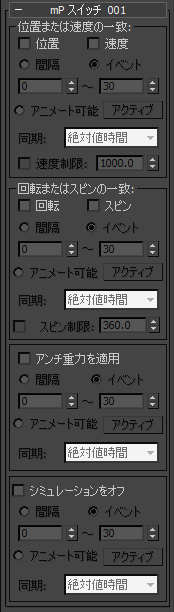
[位置または速度の一致](Match Position or Speed)領域
これらの設定を使用して、パーティクルのシミュレーションされた位置または速度を調整します。MassFX エンジンはイベントでのパーティクルのシミュレーションされたモーションを計算しますが、[位置](Position)または[速度](Speed)がオンの場合、(mParticles 以外の)通常のオペレータによって定義される位置または速度パーティクルのプロパティはシミュレーションに影響します。
- 位置(Position)/速度(Speed)
- 1 つの[mParticles スイッチ](mParticles Switch)オペレータにより、イベントでの mParticles 以外のアクションは、パーティクルの位置または速度に影響を与えることができますが、その両方に影響することはできません。どちらか一方を選択してから、必要に応じて領域の残りのコントロールを調整します。これらの一方のみをオンにすることが可能です。無効にするには、アクティブなチェック ボックスをクリックします。
- 位置
- 位置タイプのオペレータによって定義されるパーティクル位置は、そのパーティクルが指定された位置に到達できるようにするためにパーティクルに適用される必要フォースを計算するために使用されます。その後フォースは、MassFX エンジンで 1 つのパーティクルに適用されます。このように、物理的なシミュレーション方法によって、必要なパーティクルの配置が達成されます。
- [速度]
- パーティクル速度は、速度タイプのオペレータによって定義され、パーティクルが必要な速度に到達するためにそのパーティクルに適用される必要フォースの計算で使用されます。その後フォースは、MassFX エンジンで 1 つのパーティクルに適用されます。このように、物理的なシミュレーション方法によって、必要なパーティクルの速度が達成されます。
また通常は、同じイベントで[mParticles フォース](mParticles Force)オペレータを使用しないでください。その理由は、モーション シミュレーションの場合、[mParticles フォース](mParticles Force)と[mParticles スイッチ](mParticles Switch)の両方のオペレータがパーティクルに適用されるフォースを使用するため、位置/速度の一致が阻害される可能性があるからです。
- 持続時間
- [位置](Position)/[速度](Speed)オプションをイベント中ずっと、指定されたフレーム範囲の期間のみ、または明示された間隔の期間に有効にするかどうかを選択します。[間隔](In Interval)または[アニメート可能](Animatable)を使用する場合は、[同期](Sync By)オプションも設定してフレーム範囲の適用方法を指定します。
- 間隔(In Interval): 位置/速度の一致は、指定したフレーム範囲の期間にのみ発生します。
- イベント(Event): 位置/速度の一致は、[mParticles スイッチ](mParticles Switch)オペレータを含んだイベント中ずっと発生します。
- アニメート可能(Animatable): このオプションを選択すると、[アクティブ](Active)ボタンが有効になります。[アクティブ](Active)ボタンの切り替えは、標準のキーフレーム方法を使用し、[位置](Position)または[速度](Speed)スイッチ コントロールをアクティブにする複数のフレーム範囲を指定することによってアニメートできます。
- 同期
- [間隔](In Interval)または[アニメート可能](Animatable)オプションを使用するときは、[同期](Sync By)を使用して、ダンプ係数のアニメーションを適用する時間フレームを選択します([絶対値時間](Absolute)、[イベント期間](Event Duration)、または[パーティクル エージ](Particle Age))。詳細については、「[アニメーション オフセット キー](Animation Offset Keying)領域」を参照してください。
- Speed Limit
- [位置](Position)オプションを使用する場合は、この設定を使用して、[mParticles スイッチ](mParticles Switch)がシミュレーションを介して宣言された位置に到達するときの最大許容パーティクル速度を指定します。[速度制限](Speed Limit)をオンにし、数値フィールドで最大速度を設定します。
[回転またはスピンの一致](Match Rotation or Spin)領域
これらの設定を使用して、パーティクルのシミュレーションされた回転またはスピン レートを調整します。MassFX エンジンは、イベントにおけるパーティクルのシミュレーションされたモーションを計算しますが、[回転](Rotation)または[スピン](Spin)がオンの場合は、イベントの[mParticles スイッチ](mParticles Switch)オペレータの上にある回転/スピンタイプのオペレータの効果を一致させるパーティクルに適用されるトルク フォースが、オペレータによって計算されます。これらのコントロールの機能は、[位置または速度の一致](Match Position Or Speed)領域のコントロールの機能と同じです。[スピン上限](Spin Limit)以外のすべてのコントロールの詳細については、前のセクションを参照してください。
- [スピン上限]
- [回転](Rotation)オプションを使用する場合は、[MassFX スイッチ](MassFX Switch)がシミュレーションによって宣言された回転の達成を試みる間の最大許容パーティクル スピン(角度/秒)を指定します。
[アンチ重力を適用](Apply Anti-Gravity)領域
[mParticles ワールド](mParticles World)オペレータの[重力の適用](Apply Gravity)オプションがオンの場合は、[アンチ重力を適用](Apply Anti-Gravity)をオンにして、パーティクルを重力の影響から一時的に解放することができます。「重力解放」のタイミングは、[位置または速度の一致](Match Position Or Speed)領域(上記参照)でのタイミングの設定と同様にして、この領域の時間パラメータによって定義します。
[アンチ重力を適用](Apply Anti-Gravity)オプションの効果を示したビデオについては、「アンチ重力を適用(Apply Anti-Gravity)」を参照してください。
[シミュレーションをオフ](Turn Off Simulation)領域
このオプションを使用して、パーティクル シミュレーションを一時的にダイナミックからキネマティックに変換できます。ダイナミック パーティクルのアニメーションと移動は MassFX シミュレーションによって定義されるのに対し、キネマティック パーティクルのアニメーションは標準のパーティクル フロー オペレータによって代わりに制御されます。ただし、キネマティック パーティクルがダイナミック パーティクルに影響を与える可能性があります。これは、シミュレーションでのキネマティック パーティクルのシェイプとモーションが原因となる、つまりキネマティック パーティクルがダイナミック パーティクルと衝突し、シミュレーションされたモーションに影響することがあるからです。
MassFX エンジンはキネマティック パーティクルのモーションを制御しないため、シェイプがオーバーラップする可能性があります。このため、パーティクルが 1 つのイベントではキネマティックになっており、次のイベントではダイナミックになる場合には、潜在的な問題となります。そのシェイプ オペレータは、パーティクルが次のイベントに移動するときに「モーション爆発」を起こします。これは、MassFX エンジンには、パーティクルがキネマティックであったときに発生した衝突シェイプのオーバーラップを解決する必要があるためです。
[シミュレーションをオフ](Turn Off Simulation)のタイミングは、領域内のタイミング パラメータにより、[位置または速度の一致](Match Position Or Speed)領域でのタイミングの設定(上記参照)と同様の方法で制御できます。
[シミュレーションをオフ](Turn Off Simulation)オプションの効果を示すビデオについては、「シミュレーションをオフ(Turn Off Simulation)」を参照してください。