すべての CATMotion コントローラの出力は、さまざまな要素の組み合わせです。たとえば、足プラットフォーム  [リフト](Lift)の結果は、[最大ステップ時間](Max Step Time)、[最大歩幅 (長さ)](Max Stride Length)、[パス ノード](Path Node)の速度、足プラットフォームのすべての個々のコントローラに割り当てた値を組み合わせたものになります。
[リフト](Lift)の結果は、[最大ステップ時間](Max Step Time)、[最大歩幅 (長さ)](Max Stride Length)、[パス ノード](Path Node)の速度、足プラットフォームのすべての個々のコントローラに割り当てた値を組み合わせたものになります。
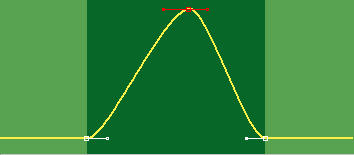
[足プラットフォーム](FootPlatform) [リフト](Lift)パネルに表示されるカーブは、このコントローラのアニメーションを確認するのには便利ですが、実際の結果はトラック ビューでも確認できます。
手順
例: 足プラットフォームの出力カーブを表示するには:
- ビューポートで要素を
 選択します。
選択します。 この例では足プラットフォームを使用しますが、CATRig のどの要素でも基本的な手順は同じです。
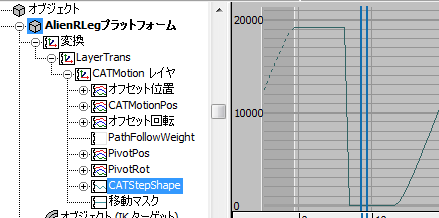
- ビューポートで選択した足プラットフォームを右クリックし、[カーブ エディタ](Curve Editor)を選択します。
カーブ エディタが開き、CATStepShape トラックのカーブが表示されます。
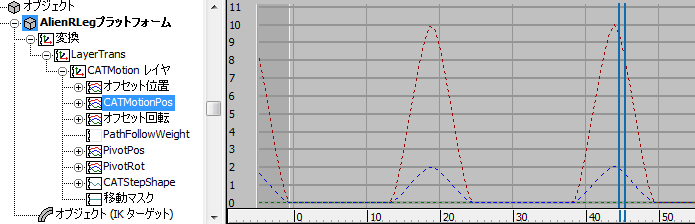
- CATMotionPos トラックをクリックします。選択した要素の情報は、このコントローラに格納されています。
これで、選択した足プラットフォームの軌道を、足プラットフォーム コントローラの CATMotion グラフと比較できます(次の図を参照)。