マッチムーブ アルゴリズムは、常に正確であるとは限らず、フィールド計測値エラーやフィーチャ トラッキング エラーの影響を受けることがあります。また、各フレームのマッチングは個別に計算されるため、特に視野を見積もる場合は、結果に「ノイズ」が多くなる可能性があります。実際のカメラが滑らかに動く場合のマッチムーブでは、このノイズを除去するために、マッチング結果をフィルタリングすると便利です。
-
 [ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker) > [移動のスムージング](Move Smoothing)ロールアウト
[ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker) > [移動のスムージング](Move Smoothing)ロールアウト
マッチングを作成した後で、[移動のスムージング](Move Smoothing)ロールアウトを使って、スムージング操作を指定および実行します。
インタフェース
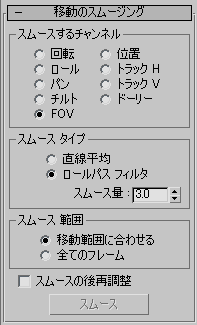
[スムースするチャネル](Channel To Smooth)領域
スムージングするパラメータやパラメータのセットを選択できます。回転トラック全体や位置トラックすべてを一度にスムージングするか、パラメータや軸を個別にスムージングするかを選択できます。
- [回転](Rotation)パン、ティルト、ロール
- [位置](Position)ドーリー、トラック H、トラック V
- FOVカメラの視野(FOV)
- パンローカル カメラの Z 軸に対する回転
- [チルト](Tilt)ローカル カメラの X 軸に対する回転
- [ロール](Roll)ローカル カメラの Y 軸に対する回転
- [ドーリー](Dolly)ローカル カメラの Y 軸に沿った移動
- [トラック H](Truck-H)ローカル カメラの X 軸に沿った移動
- [トラック V](Truck-V)ローカル カメラの Z 軸に沿った移動
[スムース タイプ](Smooth Type)領域
- [直線平均](Straight line average)選択したパラメータごとに、直線平均を生成するムーブ スムージングを行います。 パラメータが修正されていることは分っていても、その実際の値が分らない場合に便利です。視野や垂直方向の位置などがその一例です。カメラ マッチを使って、そのパラメータを最初に見積もりしてから、直線平均に対する適合値を設定し、残りのパラメータをもう一度マッチングします。
-
[ロールパス フィルタ](Low pass filter)
選択したパラメータに低域フィルタを適用して、高周波のノイズを除去します。
- スムース量
- [スムース量](Smooth Amount)編集ボックスによって幅と変動を制御できるガウス低域フィルタを使って、スムージングを実行できます。スムージングを強めるには、この値を大きくします。
[スムース 範囲](Smooth Range)領域
スムージングを実行するフレーム範囲を指定します。
- [マッチムーブ範囲](Match-Move Range)[位置合わせの移動](Match Move)ロールアウトで指定したアニメーション フレーム範囲に、スムージングを適用します。 これによって、マッチムーブ作業を、複数のフレーム範囲に分けて行うことができます。問題のないフレームに影響を与えずに、問題のあるフレーム範囲を隔離し、テストを行うために使用します。
- [すべてのフレーム](All Frames)選択したパラメータ内のすべてのキーフレームにスムージングを適用します。
- スムースの後再調整
- フィルタリングの後で、補正マッチムーブを実行するかどうかを指定します。チェックマークを付けると、スムージングしたパラメータが[位置合わせの移動](Match)ロールアウトで使用不可になり、別のマッチムーブが実行されます。再マッチングでは、スムージングを補うために他のカメラ パラメータが調整され、スムージングしていないパラメータに滑らかさが出る見積もりが行われることが多いので、この再マッチングを実行することを推奨します。
- スムース
- スムージングの種類、範囲、および量設定に基づいて、ムーブ スムージングを実行します。このボタンが使用不可になっている場合は、現在のマッチング カメラが割り当てられていないことを示します。