[カメラ トラッカー](Camera Tracker)ユーティリティは、3ds Max のカメラの動きをムービーの撮影に使用した実際のカメラの動きに合わせてアニメートすることで、バックグラウンドを同期させます。
-
 [ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker)
[ユーティリティ](Utilities)パネル > [ユーティリティ](Utilities)ロールアウト > [その他](More)ボタン > [ユーティリティ](Utilities)ダイアログ ボックス > [カメラ トラッカー](Camera Tracker)
手順
カメラ マッチムーブを生成するには:
- 3ds Max で作業するシーンを開きます。
トラッカーではフリー カメラが作成されないので、マッチムーブのためのフリー カメラをシーンに設定する必要があります。また、トラッキング フィーチャに対応するように 3D 内に配置した[ポイント](Point)または[カメラ ポイント](CamPoint)ヘルパー オブジェクトのセットも、シーンに設定する必要があります。任意で、マッチ カメラ ビューポート内の環境マップによるバックグラウンドとして、ムービーをインストールします。これは、マッチムーブを使用するか、マッチング精度をチェックして、合成をレンダリングする場合に必要になります。バックグラウンド イメージは、インストールしても、ビューポートに自動では表示されません。[表示](Views)メニュー
 [ビューポート バックグラウンド](Viewport Background)を使って、バックグラウンド ムービーを選択し、ビューポートに表示します。
[ビューポート バックグラウンド](Viewport Background)を使って、バックグラウンド ムービーを選択し、ビューポートに表示します。 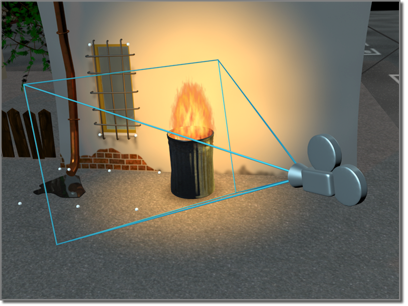
実世界のカメラがシーンを撮影する(白い点がトラッキング ポイントになる)
- [カメラ トラッカー](Camera Tracker)ユーティリティでムービー ファイルを開き、シーン内の各トラッキング フィーチャに、フィーチャ トラッキング ギズモのセットを作成します。

トラックされ、バックグラウンドとして使われる結果の場面
- フィーチャ選択ボックスとモーション検索ボックスを各ギズモに配置します。これによって、各ボックスとフィーチャの中心を合わせ、また、トラッキングするフレーム範囲でのフィーチャの最大フレーム間移動に対応するために、十分な大きさのモーション検索境界を設定することができます。
- トラッカーを、対応するシーン ポイント オブジェクトにそれぞれ関連付けます。
関連付けられたシーン ポイント オブジェクトは、実世界の次元に基づく 3D 空間に設定される
- (オプション)マッチングするフレームでトラッカーが見えなくなることがある場合は、[ムービー ステッパー](Movie Stepper)ロールアウトを使って、各トラッカーに開始フレームや終了フレームを設定します。開始フレームおよび終了フレームは、トラッカーがシーン内に現れていて、マッチング処理の一部としてトラッキング対象になる、フレームの範囲を示します。この仕組みにより、フィーチャの視界を通してビューが移動する動きを、常に現れるフィーチャのうちのいくつか(最低 6 つ)だけを使ってマッチングすることができます。
- (オプション)フィーチャのモーションやシェイプが根本的に変化したり、フィーチャが一時的に見えなくなるためにトラッキングしにくくなったりする可能性のあるフレームで、各トラッカーにキーフレームを手動で設定します。この作業は、トラッキングを実行し、トラッキング エラーが発生するフレームが分った後で行うこともできます。
- [バッチ追跡](Batch Track)ロールアウトを使って、フィーチャ トラッキングを実行します。ほとんどの場合、この処理は何度か繰り返すことになります。開始フレームや終了フレームを変更したり、エラー フレームでギズモとモーション検索ボックスの位置を調整したりして、トラッキング エラーを修正します。いくつかのフレームでギズモの位置を調整すると、新しいターゲット フィーチャ イメージが生成され、後に続くフレームが、次のキーフレームまで再トラッキングされます。トラッカーのエラー検出機能を使って、潜在的なトラッキング エラーを移動できます。フィーチャ トラッキングが完了すると、各フィーチャに、2D でのモーション位置の表が生成されます。[ムービー](Movie)ロールアウトの[保存](Save)ボタンを使って、この表をディスクに保存することができます。
- [位置合わせの移動](Match-Move)ロールアウトでマッチングするカメラを選択し、見積もりの対象となるカメラ パラメータを選択し、ムービーとシーン アニメーションのフレーム範囲を設定して、マッチングを実行します。これによって、選択したカメラ パラメータのキーフレーム アニメーションが生成されます。

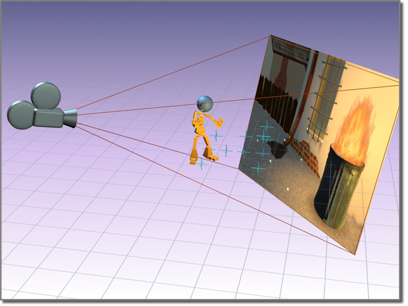
カメラ トラッキング終了後、シーンのジオメトリ(キャラクタ)は撮影されたバックグラウンドに対応する
- 明らかなマッチング エラーをチェックし、そのフレームでトラッカー ギズモの位置を調整します。フレームでギズモを手動で調整すると、それに応じて、カメラ位置がマッチング機能によって再計算されます。
- (オプション)選択したカメラ パラメータにスムージングを適用し、他のパラメータの補正マッチングの再計算をします。
[カメラ トラッカー](Camera Tracker)には、2D 平面でのトラッカーの動きに従うことによって、ビデオに従ったり、一致したりするように、3ds Max ジオメトリをアニメートする機能もあります。この種類のアニメーションでは、シーンの計測値は必要ありません。[カメラ トラッカー](Camera Tracker)ユーティリティの[オブジェクト固定](Object Pinning)ロールアウトを使って、トラッキングができます。