このページでは、ネイティブの Simulation Mechanical (SimMech)ソルバーを使用した、非線形シミュレーション実行における一般表面間接触のジオメトリ パラメータについて述べます。これらのパラメータは[接触オプション]ダイアログ ボックスの[ジオメトリ]タブにあります。
[ジオメトリ パラメータ]セクション
[接触間距離]: 計算時間を短縮するには、このパラメータを使用します。この場合、2 つの表面間の距離が指定値より短い場合にのみ接触と見なされます。プロセッサで 2 つのパーツが遠く離れていることが認識されている場合、パーツが接触しているかどうかのチェックの手順が省略されます。パーツを 2 つの手順の間で動かしすぎないよう注意する必要があります。パーツ同士が実際に 2 つの手順間で互いに通過している場合でも、計算手順では接触していない可能性があります。この条件の場合、接触は検出されなくなります。図 1 を参照してください。0 (既定)の値の場合は、接触距離がパーツ上の表面要素の最大寸法と等しくなります。この仮定は、多くの場合に当てはまりますが、高速のアプリケーションには適さないことがあります。
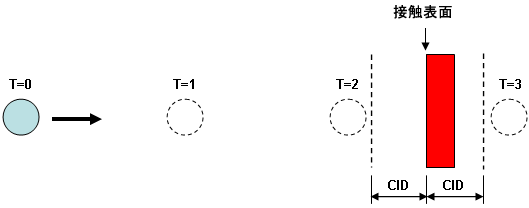
図 1: 接触間距離
高速で移動する球を 4 つの時間ステップ(T=0、1、2、3)で示します。接触は、物体が各接触間距離(寸法 CID)の範囲内にある場合にのみチェックされます。この例の場合、球はすべての時間ステップで接触間距離の外側にあるため、球がブロックを通過しても検出されません。
[最大干渉距離]: 表面接触は、2 次パーツ上の節点から 1 次パーツの表面の真下までの距離が指定された距離よりも大きい場合、適用されません。(この場合、接触力はゼロになります。)このフィールドは、1 次表面の真下にある 2 次表面上の点間で虚偽の接触が適用されるのを防止する目的で使用します。このフィールドの値が 0.0 の場合、局部座標系での最大くい込み距離としてサーフェス要素の最大寸法が使用されます。このフィールドには、基本的に 0.0 以外の値を指定しないことをお勧めします。接触が正常に検出されているときに過剰な干渉が発生する場合は、最大干渉距離ではなく接触剛性を増やすことをお勧めします。
[最大初期距離]: 部品間の移動が大きく行われる場合、時間ステップごとに実際に接触している点をプロセッサで特定するには、(表面間接触のメイン ダイアログ ボックスを使用して)接触を自動更新するのが最適な方法です。ただし、パーツ間の運動がほとんどない場合、生成される接触要素の数を最小限に抑えると、解析時間を短縮できます。初期状態で[最大初期距離]の値よりも間隔が離れている要素の間に接触は作成されません。したがって、要素の移動がどれだけ近くても、要素間で接触は発生しません。これにより、接触のチェック回数が制限され、解析時間が短くなります。
ヨークとクレビス内にピンがあるとします。ヨークに対してピンが回転しない場合、ピンの左側は穴の右側と接触しません。したがって、最大初期距離を小さな距離(1 つの要素のサイズなど)に設定すると、隣接する節点にある穴とピンを接続するのに十分な接触要素が作成されます。これにより、モデルのサイズが小さくなり、接触要素の状態をチェックする回数が少なくなり、解析の処理時間が短くなります。
- [接触要素の更新]オプション([一般接触設定]ダイアログ ボックス内)が[行わない]に設定されている、または
- [接触タイプ]オプション([接触オプション]ダイアログの[高度]タブ)が[点から点]に設定されている。
他の設定の場合、このフィールドは無効になります。
この値が 0.0 で、[接触要素の更新]が[行わない]に設定されている場合、Simulation Mechanical ではメッシュ サイズの 2 倍に等しい自動値が適用されます。 (自動値は点から点接触には適用されません。)自動値、またはユーザ定義の値が小さすぎる場合、接触相互作用が欠落する可能性があります。接触が欠落しないようにするため、0.0 以外の値をお勧めします。
[接触要素側を拡張]: 表面間接触の相互作用領域は、要素の表面の拡張部分として考えることができます(法線から要素面の方向に拡張)。 表面が凸状である場合、この拡張接触相互作用領域で 2 つの隣接する要素間にギャップが残ります。隣接するパーツの節点は、接触が検出されないままこれらのギャップに干渉することがあります。 または、2 つの要素間で静止することがあります。結果として、節点が 2 つの接触する隣接要素間で入れ替わるときに接触チャタリングが発生することがあります。(図 2a 参照。)次の 3 つのオプションのいずれかを選択します。
- [自動]: このオプションを選択すると、接触要素の境界が自動的に少し延長され、ギャップが埋められます。(図 2b 参照。)[自動]オプションを選択した場合、プロセッサにより、接触表面の長さを延長する必要がある場合と延長する距離が検出されます。
ターゲット接触節点
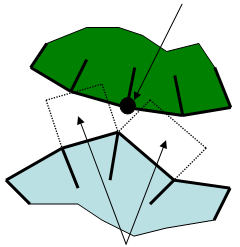
2 つの接触領域
(過度に拡張)
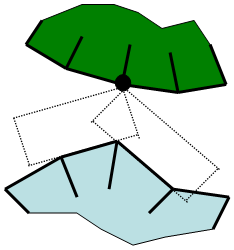
拡張された 2 つの接触領域
(a) 接触要素を拡張しない場合、ターゲット節点がサーフェスを横切ってスライドするため、要素間の接触が円滑に行われません。 (b)接触要素を拡張する場合、ターゲット節点が接触要素間でスライドするため、より円滑に接触領域が作成されます。 図 2: 接触面の拡大 - [回避]: 接触表面が拡張されないようにするには、このオプションを使用します。
- [平滑化]: 接触表面に滑らかさが欠如している場合、2 つの問題が生じます(滑らかさは、2 つの隣接する要素間における法線方向の変化の度合いを示します)。第 1 の問題は収束の質の低下、第 2 の問題は結果の質の低下です。隣接する 2 つの要素が曲面などのように同一平面上にない場合、ターゲット節点が要素の境界を超えて移動すると、接触力の法線ベクトルの方向が突然変化します。ジオメトリが不連続であることを考慮すると、こうした状況は避けられません。滑らかさが欠如していることにより、要素の境界を越えて振幅が生じたり、ターゲット節点が要素の境界に挟まり込む場合があります。
このような状況を最小限に抑えるため、[接触要素側を拡張]ドロップダウン メニューから[平滑化]オプションを選択します。 このオプションを選択すると、[平滑化因子]入力フィールドがアクティブになります。
- [平滑化因子]: 平滑化因子は、2 つの要素のコーナー(または同じ要素の 2 つの辺)にフィレットを配置することであると捉えることができます。(解説のために図 3 を参照してください。)平滑化因子は、0 (平滑化を行わない)~ 0.5 (要素のエッジの半分にまで遷移区間を延長する)の範囲の値です。
平滑化は、2 つの異なる接触サーフェスの接合部では行われません。各接触サーフェスの境界内でのみ行われます。
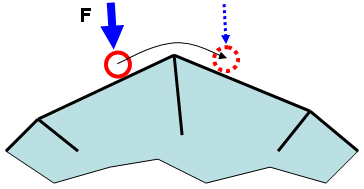
(a) 別の形状(この図には表示されていません)のターゲット節点(赤い円)が左から右への移動中に力 F により接触しています。要素間で節点が移動すると、反力の方向が即座に変化し、収束が困難になる場合があります。
円滑な遷移
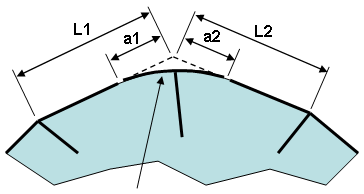
(b)[平滑化]オプションを有効にすると、鋭いコーナーが除去されます。これにより、節点(図を見やすくするため省略しています)が左から右に移動するときに、反力の方向が滑らかに変化します。距離 a1 と a2 は次のように計算されます。
a1 = 平滑化因子 * L1
a2 = 平滑化因子 * L2
図 3: 接触表面の平滑化
表面間接触では、表面上の節点が別の表面の要素面を通過しているかどうかを常にチェックしています。このため、表面 A の節点は平滑化された表面 B に接触し、表面 B の節点は平滑化された表面 A に接触します。技術的には、平滑化された表面 A は平滑化された表面 B に接触しません。
[接触要素更新パラメータ]セクション
[探索半径]: 接触要素が更新されるたびに作成される半径を指定します。 このフィールドは、[ 一般接触設定]ダイアログ ボックスの[接触要素更新]タブで[ユーザ定義接触要素の更新頻度]オプションが選択されている場合にのみ使用できます。 ユーザ定義の接触要素の更新頻度はグローバル パラメータですが、個々の接触ペアごとに探索半径を別々に定義する必要があります。