다음은 HI IK 솔버에 대한 또 다른 컨트롤입니다. 여기서 IK 솔버 평면은 직접 또는 대상 오브젝트를 사용하여 애니메이션할 수 있는 회전 각도를 통해 제어됩니다.
-
HI IK 체인의 엔드 이펙터 선택 >
 모션 패널 > 매개변수 버튼 > IK 솔버 특성 롤아웃
모션 패널 > 매개변수 버튼 > IK 솔버 특성 롤아웃
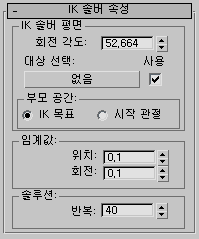
상위 공간 그룹에서는 회전 각도의 상위 공간으로 IK 목표를 사용할지 시작 관절을 사용할지 선택할 수 있습니다. IK 목표(기본값)을 선택한 경우 체인의 회전 각도가 목표의 상위 공간에 정의됩니다. 시작 관절을 선택한 경우에는 시작 관절의 상위 공간이 회전 각도의 기준이 됩니다. 이 두 옵션을 사용하면 두 개의 HI IK 솔버를 사용하는 체인에서 회전 각도를 더 세부적으로 제어할 수 있습니다. 예를 들어, 위쪽 체인의 첫 번째 솔버는 회전 각도를 시작 관절의 상위 공간에서 사용할 수 있는 반면 아래쪽 체인의 두 번째 IK 솔버에서는 IK 목표의 상위 공간이 사용됩니다. 이 경우 한 쪽 체인에서 회전 각도를 변경해도 다른 쪽 체인의 방향이 바뀌지 않습니다.
임계값 및 솔루션 그룹에서 IK 솔루션을 미세 조정할 수 있습니다. 위치 임계값은 목표가 엔드 이펙터로부터 떨어질 수 있는 최대 거리를 단위 수로 설정합니다. 회전은 각도를 사용하여 동일한 기능을 수행합니다.
솔루션 그룹의 반복은 포기하기 전까지 IK 솔루션을 수행하는 최대 시도 횟수입니다.
IK 애니메이션에 지터가 생기면 반복 횟수를 200회로 늘려 보십시오. 반복 횟수를 증가하면 계산 시간이 느려지지만 결과가 향상됩니다.
회전 각도 조작자
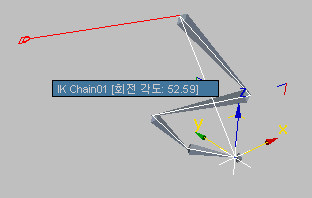
![]() 회전 각도는 이 롤아웃에서 스피너를 사용하여 조정하거나 조작기로 조정할 수 있습니다. 이렇게 하려면 선택 및 조작를 설정합니다. 회전 각도 조작기는 뷰포트에 핸들로 표시됩니다.
회전 각도는 이 롤아웃에서 스피너를 사용하여 조정하거나 조작기로 조정할 수 있습니다. 이렇게 하려면 선택 및 조작를 설정합니다. 회전 각도 조작기는 뷰포트에 핸들로 표시됩니다.
회전 각도 조작기
회전 각도 조작기
마우스를 조작기 위로 가져가면 빨간색으로 변하는데 이때 조작기를 드래그하여 회전 각도를 변경할 수 있습니다. 그 동안 자동 키 버튼이 활성화 상태일 수 있습니다.
대상 오브젝트를 사용하여 회전 각도를 움직일 수도 있습니다. 대상 오브젝트를 선택한 다음 움직이면 회전 각도가 애니메이션됩니다.
회전 각도 조작기는 표준 평면각 조작기입니다. HI 솔버에는 이 조작기를 표시하기 위한 고유 컨트롤이 제공되며, 이러한 컨트롤은 IK 표시 옵션 롤아웃에 있습니다.
절차
IK 솔루션의 정밀도를 높이려면 다음을 수행합니다.
-
 HI IK 체인에서 목표를 선택합니다.
HI IK 체인에서 목표를 선택합니다. - IK 솔버 특성 롤아웃의 솔루션 그룹에서 반복을 200으로 늘립니다.
-
 애니메이션을 재생하거나
애니메이션을 재생하거나  렌더링합니다.
렌더링합니다. - 위치 및 회전 임계값을 더 작게 조정할 수도 있습니다.
인터페이스
IK 솔버 평면 그룹
- 회전 각도
- 사람의 팔 다리에서 무릎 또는 팔꿈치의 방향을 결정하는 솔버 평면을 제어합니다. 표시 옵션 롤아웃에서 회전 각도 표시를 설정하고 조작 모드를 설정하면 뷰포트에서 회전 각도를 조작할 수 있습니다. 회전 각도 조작기가 뷰포트에 표시되면 핸들을 쌍방향으로 움직여 솔버면을 애니메이션할 수 있습니다.
- 대상 선택
- 회전 각도를 애니메이션하는 데 사용할 다른 오브젝트를 선택할 수 있습니다.
- 사용
- 대상의 사용을 설정 또는 끕니다.
- 상위 공간
- 회전 각도의 기준이 되는 공간을 정의합니다. 다중 솔버를 사용하는 체인에 이 옵션을 사용하면 한 쪽 체인의 회전 각도를 조작해도 다른 쪽 체인이 영향을 받지 않습니다. 자세한 내용은 백서: HI IK 솔버의 회전 각도를 참조하십시오.
- IK 목표IK 목표를 기준으로 회전 각도 상위 공간을 정의합니다.
- 시작 관절시작 관절을 기준으로 회전 각도 상위 공간을 정의합니다.
임계값 그룹
시스템에서 계산에 사용하는 허용 오차를 정의합니다.
- 위치
-
목표가 엔드 이펙터에서 멀어질 수 있는 제한 거리를 단위 수로 설정합니다. 이 숫자는 낮게 유지하십시오.
- 회전
-
목표의 회전이 엔드 이펙터 회전에서 벗어나 회전할 수 있는 제한 거리를 각도로 설정합니다. 최상의 결과를 얻으려면 이 숫자를 낮게 유지하십시오.
HI 솔버 및 IK 팔 다리 솔버에서 회전 임계값을 조정하는 것은 의미가 없습니다. IK 계산에서 회전 구성요소 지원 여부는 플러그인 솔버에 따라 다릅니다.
솔루션 그룹
애니메이션의 정밀도를 제어합니다. IK 계산 결과에 의해 거칠거나 떨리는 애니메이션이 만들어지는 경우 반복 값을 늘려야 합니다.
- 반복 횟수
- 목표 및 엔드 이펙터 위치 간의 최적의 일치를 찾기 위한 IK 솔루션의 시도 횟수입니다. 동작이 자연스럽게 연결되지 않는 경우 이 숫자를 늘려야 합니다.