![]()
-
Biped 선택 >
 모션 패널 > Biped 롤아웃 >
모션 패널 > Biped 롤아웃 >  (발자국 모드) > 발자국 만들기 롤아웃 >
(발자국 모드) > 발자국 만들기 롤아웃 >  (걷기) >
(걷기) >  (여러 발자국 만들기) > 여러 발자국 만들기:걷기 대화상자
(여러 발자국 만들기) > 여러 발자국 만들기:걷기 대화상자
모션 패널의 발자국 만들기 롤아웃에서 걷기 보행을 선택한 다음 여러 발자국 만들기를 클릭하면 이 대화상자가 표시됩니다.
절차
Biped가 층계를 올라가거나 내려가게 하려면 다음을 수행하십시오.
- 첫 번째 발자국 그룹에서 실제 보폭 높이를 0이 아닌 다른 값으로 설정합니다. 값이 0보다 높으면 Biped가 위로 걸음을 옮기고 값이 0 미만이면 아래로 걸음을 내딛게 됩니다.
Biped가 제자리에서 걷도록 하려면 다음을 수행하십시오.
- 첫 번째 발자국 그룹에서 파라메트릭 보폭 길이를 0으로 설정합니다.
Biped가 뒤로 걷도록 하려면 다음을 수행하십시오.
- 첫 번째 발자국 그룹에서 파라메트릭 보폭 길이를 0보다 작은 값으로 설정합니다.
파라메트릭 보폭 길이의 절대값은 여전히 보폭 길이입니다.
Biped가 빨리 걷도록 하려면 다음을 수행하십시오.
- 타이밍 그룹에서 보간을 클릭합니다.
마지막 발자국 그룹의 컨트롤이 활성화됩니다.
- 마지막 발자국 그룹의 다음 발자국까지 시간을 첫 번째 발자국 그룹의 다음 발자국까지 시간보다 작은 값으로 설정합니다.
한 그룹이나 두 그룹에서 모두 값을 조정할 수 있습니다. 마지막 발자국을 첫 번째 발자국보다 짧은 시간으로 만드는 것이 중요합니다.
인터페이스
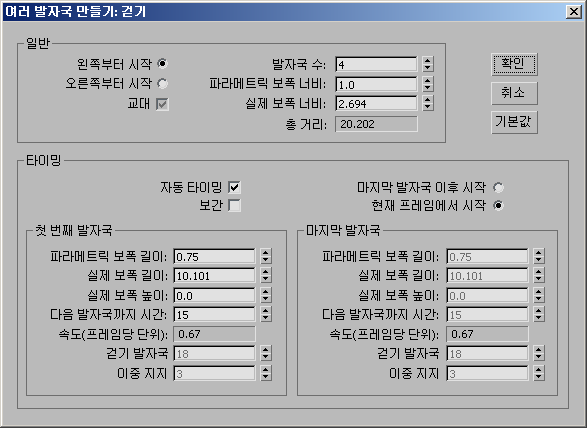
일반 그룹
- 왼쪽부터 시작왼쪽 걸음으로 발자국 시퀀스를 시작합니다.
- 오른쪽부터 시작오른쪽 걸음으로 발자국 시퀀스를 시작합니다.
- 교대
- 발자국이 오른쪽과 왼쪽을 교대로 실행합니다. 걷기 보행을 선택하면 항상 교대가 선택됩니다. 뛰기 또는 점프 보행을 선택한 경우에만 교대를 선택 취소할 수 있습니다.
- 발자국 수
- 만들어질 새 발자국 수를 결정합니다.
- 파라메트릭 보폭 폭
- 보폭 폭을 골반 폭의 백분율로 설정합니다. 값이 1.0이면 관절 폭과 같은 보폭 폭이 생성됩니다. 값이 3.0이면 넓고 뒤뚱거리는 보행이 생성됩니다. 이 설정을 변경하면 실제 보폭 폭이 자동으로 변경됩니다.
파라메트릭은 Biped 해부학적 구조 측면에서 매개변수를 설명하고 실제는 3ds Max 단위로 값을 설명합니다.

보폭 폭=1 및 보폭 폭=3
- 실제 보폭 폭
- 모델링 단위로 보폭 폭을 설정합니다. 이 설정을 변경하면 파라메트릭 보폭 폭이 자동으로 변경됩니다.
- 총 거리
- 발자국이 현재 설정으로 이동하는 총 거리를 표시합니다. 이 값은 직접 변경할 수 없습니다.
- 확인
-
현재 설정으로 발자국을 만듭니다.
- 취소
-
발자국 만들기를 취소합니다.
- 기본값
-
대화상자의 값을 기본값으로 재설정합니다.
타이밍 그룹
- 자동 타이밍
- 자동으로 타이밍 매개변수를 설정합니다. 자동 타이밍은 걷기 보행의 다음 타이밍 매개변수에 영향을 줍니다.
- 걷기 발자국, 이중 지지
자동 타이밍이 선택된 경우 자동으로 이 매개변수가 적절한 값으로 조정됩니다. 보폭 길이 및 다음 발자국까지 시간 매개변수를 조정하여 발자국 시퀀스를 제어합니다.
자동 타이밍이 해제된 경우 보행 타이밍 매개변수를 조정하여 발자국 시퀀스를 제어할 수 있지만 다음 발자국까지 시간 매개변수는 변경할 수 없습니다.
- 걷기 발자국, 이중 지지
- 보간
- 일련의 발자국의 가속 또는 감속을 제어합니다. 이 상자를 선택하면 마지막 발자국 아래의 두 번째 단계 매개변수 집합이 활성화됩니다.
Biped는 첫 번째 발자국의 매개변수 값으로 시작하고 마지막 발자국의 매개변수 값으로 끝나는 발자국을 만듭니다.
Biped는 둘을 보간하여 시간 경과에 따라 변경되는 일련의 발자국을 만듭니다.
보간을 선택 취소하면 마지막 발자국 매개변수가 회색으로 표시됩니다. Biped가 첫 번째 발자국의 매개변수만 사용하여 모든 발자국을 만듭니다.
- 마지막 발자국 이후 시작새로 만든 발자국을 기존 발자국 시퀀스의 끝에 추가합니다.
- 현재 프레임에서 시작새로 만든 발자국을 기존 발자국 시퀀스 뒤의 현재 프레임에서 삽입하여 다시 발자국이 시작되기 전에 시간 간격을 만들 수 있습니다.
첫 번째 발자국 및 마지막 발자국 그룹
- 파라메트릭 보폭 길이
- 새 발자국의 보폭 길이를 Biped 다리 길이의 백분율로 설정합니다. 기본값 0.75는 정상 비율의 평균 보폭을 제공합니다.
값이 1.0이면 다리 길이와 같은 보폭 길이가 생성되며 Biped가 다음 단계에 도달하기 위해 약간 늘어납니다. 값이 0.0이면 Biped가 제자리에서 걷습니다. 보폭 길이가 음수이면 Biped가 뒤로 걷습니다.
Biped가 뒤로 걷는 경우 순운동학을 단순히 반대로 하는 것이 아니라 발가락이 먼저 지면에 닿은 다음 발꿈치가 닿아 올바른 발 상태 시퀀스를 유지합니다.
파라메트릭 보폭 길이를 조정하면 실제 보폭 길이 값이 자동으로 변경됩니다.

보폭 길이=0.75 및 보폭 길이=1
- 실제 보폭 길이
- 새 발자국의 보폭 길이를 3ds Max 단위로 설정합니다.
파라메트릭 보폭 길이에 대해서도 동일한 규칙이 적용됩니다(위에서 설명).
실제 보폭 길이를 조정하면 파라메트릭 보폭 길이 값이 자동으로 변경됩니다.
- 실제 보폭 높이
- 발자국 사이의 상승이나 하락을 설정합니다. 이 매개변수를 사용하여 경사 또는 계단을 올라가거나 내려가는 발자국 집합을 만들 수 있습니다.
실제 보폭 높이 값은 각 새 발자국 사이의 높이 차(단위)입니다. 양수 값은 올라가고 음수 값은 내려갑니다.

보폭 높이=5단위
- 다음 발자국까지 시간
- 각 발자국 이동 주기의 프레임 수를 지정합니다. 주기는 발이 지면에 닿는 프레임에서 시작하고, 발이 올라가고 이동하는 동안 계속되고, 발이 다시 지면에 닿기 전의 프레임에서 끝납니다. 이 매개변수는 자동 타이밍이 설정된 경우에만 활성화됩니다.
- 속도
- 프레임당 Biped가 움직이는 단위 수를 표시합니다. 이 값은 다른 매개변수의 변경 내용에 따라 변경되며 직접 조정할 수는 없습니다.
자동 타이밍이 해제된 경우 다음 두 개의 매개변수만 활성화됩니다.
자동 타이밍 대신 이 매개변수를 사용하여 일련의 발자국에 대한 전진 모션 속도를 제어할 수 있습니다. 그러나 이 매개변수는 모두 발자국이 지면과 접촉하는 시간에 영향을 주므로 매개변수를 사용하여 걷기 속도를 늦추면 걷기가 주저하는 '중지-이동' 품질이 됩니다.
- 걷기 발자국
- 각 발자국이 걷기 중에 지면에 있는 프레임 수를 지정합니다.
숫자가 클수록 각 Biped 발이 지면과 접촉하는 시간이 길어져 걷기 모션 속도가 느려집니다.
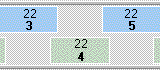
발자국 3에서 5는 각각 22개 프레임 동안 지면에 있습니다.
- 이중 지지
- 걷기 중에 양발이 동시에 지면에 닿는 프레임 수를 지정합니다.
숫자가 클수록 각 걷기 주기 중에 양발이 지면과 접촉해 있는 기간이 길어져 걷기 모션 속도가 느려집니다.

점선이 이중 지원 기간(6개 프레임)을 둘러쌉니다.