오일러 XYZ 회전 제어기는 X, Y 및 Z축 각각에 대한 회전의 각도를 지정하기 위해 별도의 단일 값 부동 제어기를 결합한 복합 제어기입니다. 오일러 XYZ은 TCB 회전 제어기에서 사용하는 쿼터니언 회전만큼 부드럽지는 않지만 회전 함수 곡선을 편집하기 위해 사용할 수 있는 유일한 회전 유형입니다.
-
뷰포트에서 오브젝트 선택 >
 모션 패널 > 제어기 할당 롤아웃 > 회전 트랙 선택 오일러 XYZ가 기본 제어기로 할당되어 있습니다.
모션 패널 > 제어기 할당 롤아웃 > 회전 트랙 선택 오일러 XYZ가 기본 제어기로 할당되어 있습니다.
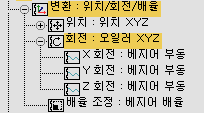
오일러 XYZ 회전 제어기에서 개별 트랙을 위치, 회전 및 배율 조정 변환의 X, Y 및 Z 구성요소에 할당합니다. 그러나 이 제어기는 기본적으로 각 축에 하나씩 총 세 개의 키를 할당합니다. 이를 피하기 위해 사용자 인터페이스 사용자 정의 동작을 사용하여 명시적 축 키를 만들 수 있습니다. 이 작업은 주 UI 그룹  키 설정 도구 범주에서 가능합니다.
키 설정 도구 범주에서 가능합니다.
짐벌 기준 좌표계는 이 제어기와 함께 사용합니다. 다른 좌표계를 사용할 경우 한 축을 중심으로 회전하면 항상 최소한 두 개의 트랙이 변경됩니다. 한 축을 중심으로 회전하는 짐벌 회전은 하나의 트랙만 변경하기 때문에 함수 곡선을 보다 쉽게 편집할 수 있습니다.
오일러 회전 대 TCB 회전
오일러 회전은 3ds Max 5 이전의 기본 회전 제어기였던 TCB 회전 제어기에 비해 여러 가지 장점을 제공합니다. 오일러 회전에서는 TCB에서 제공하지 않는 함수 곡선을 제공합니다. 오일러 회전의 경우 곡선 편집기에서 조작 가능한 3개의 개별 곡선을 사용할 수 있습니다. TCB 회전은 장력, 연속성 및 바이어스 설정으로만 제어할 수 있기 때문에 X, Y 및 Z 회전을 개별적으로 키프레임 및 조작하기 어렵습니다.
그렇지만 TCB 회전의 경우 주어진 키프레임에서 180도보다 큰 회전이 가능합니다. 회전 감기 옵션을 설정하면 360도보다 큰 회전값을 얻을 수 있습니다.
오일러 회전 및 웨이브 형상 부동 제어기
오일러 회전 제어기는 라디안을 사용하기 때문에 다른 제어기를 오일러 축에 적용하는 경우 단위를 조정해야 합니다. 예를 들어, 웨이브 형상 부동 제어기는 속성 그래프에서 기본 진폭이 100입니다. 웨이브 형상 부동 제어기를 오일러 축에 적용하는 경우 기본 진폭은 100 라디안입니다. 그러므로 진폭 설정이 5729.598(100 라디안의 도수)이 됩니다.
오일러 회전 및 노이즈 부동 제어기
노이즈 부동 제어기를 오일러 축에 적용하는 경우 기본 강도 설정은 286.479 또는 10라디안의 50%에 해당하는 도수(최대 디플렉션)가 됩니다.
오일러 회전 및 MIDI 모션 캡처 제어기
MIDI 모션 캡처 제어기가 적용된 경우 매개변수 배율 조정이 라디안으로 이루어져 1.0의 최대값 기본 설정 시 57.2958도의 상한값을 갖습니다.
절차
예: 오일러 XYZ 회전 사용하기
- 상자를 만듭니다.
- 모션 패널로 이동한 후 할당된 회전 제어기가 오일러 XYZ인지 확인합니다. 그렇지 않은 경우 제어기 할당 롤아웃 리스트에서 회전 트랙을 강조 표시하고
 (제어기 할당)을 클릭한 다음 제어기 할당 대화상자 리스트에서 오일러 XYZ을 선택합니다. 확인을 클릭합니다.
(제어기 할당)을 클릭한 다음 제어기 할당 대화상자 리스트에서 오일러 XYZ을 선택합니다. 확인을 클릭합니다.  을 켭니다.
을 켭니다. - PRS 매개변수 롤아웃 하단에서 회전을 클릭합니다.
- 필요한 경우 오일러 매개변수 롤아웃에서 X 회전 축 버튼을 클릭합니다
- PRS 매개변수 롤아웃의 키 만들기 그룹에서 회전을 클릭합니다.
3ds Max에서 회전 키를 만듭니다.
- 시간 슬라이더를 프레임 50으로 이동합니다.
- 다시 PRS 매개변수 롤아웃의 키 만들기 그룹에서 회전을 클릭합니다.
- 키 정보(기본) 롤아웃에서 값 필드에 500을 입력합니다.
- 오일러 매개변수 롤아웃에서 Z 회전 축 버튼을 클릭한 다음 키 정보(기본) 롤아웃의 값 필드에 90을 입력합니다.
 애니메이션을 실행합니다. 상자가 X축을 중심으로 500도, Z축을 중심으로 90도 회전합니다. 이 경우에는 X축 회전이 먼저 일어난 다음 Z축 회전이 일어납니다.
애니메이션을 실행합니다. 상자가 X축을 중심으로 500도, Z축을 중심으로 90도 회전합니다. 이 경우에는 X축 회전이 먼저 일어난 다음 Z축 회전이 일어납니다.
로컬 회전 제어를 위해 리스트 제어기와 함께 오일러 XYZ를 사용하려면 다음을 수행합니다.
- 로컬 회전 제어를 수행할 오브젝트를 선택합니다. 예를 들어, 주전자와 더미를 만듭니다.
- 더미를 애니메이션합니다.
- 모션 패널을 엽니다.
- 제어기 할당 롤아웃에서 회전 변환을 선택한 다음 더미를 관찰 대상으로 지정한 상태에서 관찰 제어기를 주전자에 지정합니다.
이제 더미를 통해 제어되는 회전이 있는 오브젝트가 생겼습니다.
- 회전: 관찰 제어기가 창에서 선택된 상태에서 다시 (제어기 할당)을 선택하고 회전 리스트를 선택합니다.
이제 관찰 제약 조건이 리스트에서 첫 번째 회전 제어기로 적용된 리스트 제어기가 있습니다.
- 창에서 아래로 스크롤하여 레이블이 사용 가능인 항목을 선택한 다음 다시 제어기 할당을 클릭합니다.
- 오일러 XYZ를 선택합니다.
이제 관찰 회전이 첫 번째 제어기, 오일러 XYZ이 두 번째 제어기인 리스트 제어기가 생겼습니다.
- 회전 리스트 롤아웃에서 레이어 창의 오일러 XYZ을 강조 표시한 다음 활성화 설정을 클릭합니다.
- 오일러 매개변수 롤아웃에서 축 순서를 ZYX로 변경합니다.
이제 관찰 회전 제어와 독립적으로 회전을 애니메이션할 수 있습니다. 이제 버전 4 이전에서 사용한 로컬 오일러 제어기와 동일하게 동작합니다.
리스트 제어기와 오일러 XYZ 회전 제어기를 함께 사용하면 로컬 오일러 회전 제어기(이전 버전의 3ds Max에서 사용 가능)와 유사한 기능을 얻을 수 있습니다.
인터페이스
오일러 매개변수는 모션 패널에 표시됩니다.
오일러 매개변수 롤아웃은 PRS 매개변수 롤아웃에서 회전이 선택되면 표시됩니다.
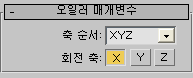
- 축 순서
-
회전이 계산되는 순서를 선택합니다. 기본값은 X,Y,Z 순서이며, 여기서 X축이 제일 먼저 회전됩니다.
- X
-
X축 회전 각도에 대한 제어기 특성을 표시합니다.
- Y
-
Y축 회전 각도에 대한 제어기 특성을 표시합니다.
- Z
-
Z축 회전 각도에 대한 제어기 특성을 표시합니다.
각 축에서는 부동 데이터 유형을 사용하는 고유한 독립적 제어기를 사용합니다. 예를 들면, X 및 Y 회전축은 베지어 부동 제어기를 사용하고 Z 회전축은 노이즈 부동 제어기를 사용할 수 있습니다.