드래그 공간 왜곡은 특정 범위 안에서 지정한 크기만큼 파티클 속도를 줄이는 파티클 모션 댐퍼입니다. 선형, 구형 또는 원통형으로 이 제동기를 적용할 수 있습니다. 드래그는 시뮬레이션 바람 저항, 밀도 높은 미디어(예: 물)로의 전달, 힘 필드의 영향 및 기타 유사한 상황에 유용합니다.
-
 만들기 패널 >
만들기 패널 >  (공간 왜곡) > 힘 > 오브젝트 유형 롤아웃 > 드래그 버튼
(공간 왜곡) > 힘 > 오브젝트 유형 롤아웃 > 드래그 버튼
각각의 제동 유형을 통해 여러 벡터를 따라 제동 효과를 제어할 수 있습니다. 또한 제동은 속도와 같은 파티클 시스템 설정의 영향을 받습니다.
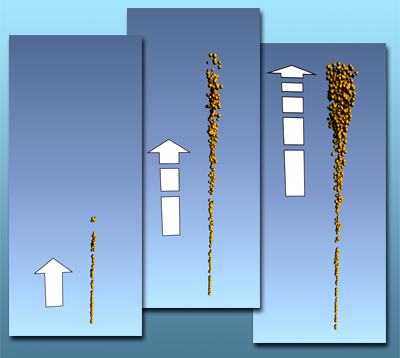
드래그하면 파티클 스트림의 속도가 줄어듭니다.
절차
드래그 공간 왜곡을 만들려면 다음을 수행합니다.
- 만들기 패널에서 (공간 왜곡)을 클릭합니다. 리스트에서 힘을 선택한 다음 오브젝트 유형 롤아웃에서 드래그를 클릭합니다.
- 뷰포트에서 드래그하여 공간 왜곡을 만듭니다.
공간 왜곡은 처음에 박스 내 박스로 표시되어 기본 선형 제동 모드를 사용 중임을 나타냅니다.
- 제동을 구형 또는 원통형으로 적용하려면 명령 패널에서 구형 제동 또는 원통형 제동을 선택합니다. 주: 공간 왜곡의 위치와 방향은 3가지 제동 유형 모두에서 중요한 역할을 합니다.
- 필요 시 현재 제동 유형의 설정을 변경하십시오.
인터페이스
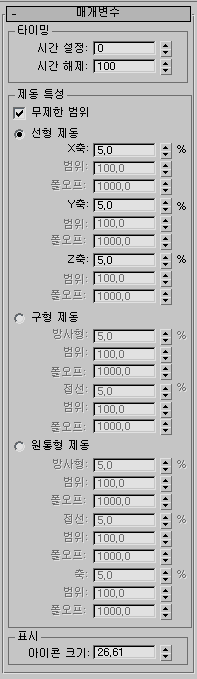
타이밍 그룹
- 시간 설정/시간 해제
-
공간 왜곡이 활성 및 비활성화되는 프레임 번호입니다.
제동 속성 그룹
이 그룹에서는 선형 제동, 구형 제동 또는 원통형 제동과, 각각에 대해 매개변수 세트를 선택할 수 있습니다.
- 무제한 범위
-
설정하면 드래그가 무제한 범위에서 전체 제동 강도를 가합니다. 해제 시 현재 제동 유형의 범위 및 폴오프 설정이 적용됩니다.
- 선형 제동각 파티클의 모션이 공간 왜곡의 로컬 X, Y, Z축에 대한 벡터로 구분됩니다. 각 벡터에 대해 제동이 가해지는 영역은 해당하는 범위 설정에 따라 두께가 결정되는 무한 평면입니다.
- X축/Y축/Z축
-
제동의 영향을 받는 로컬 드래그 공간 왜곡 축을 따라 파티클 모션의 백분율을 지정합니다.
- 범위
-
"범위 평면" 또는 특정 축에 대해 직각인 무한 평면의 두께를 설정합니다. 무제한 범위를 해제한 경우에만 유효합니다.
- 폴오프
-
선형 제동이 적용되는 X, Y 또는 Z 범위 밖의 거리를 지정합니다. 제동은 범위 거리에서 가장 강력하고, 폴오프 한계까지 선형적으로 줄어들며, 그 밖에서는 효과가 없습니다. 폴오프는 범위 밖에서만 유효하나 아이콘의 중앙으로부터 측정하며 항상 범위 값과 동일한 최소값을 갖습니다. 무제한 범위를 해제한 경우에만 유효합니다.
- 구형 제동드래그가 구형 제동 모드에서 작동할 때 그 아이콘은 구 안의 구입니다. 파티클 모션은 방사형 및 접선 벡터로 분할됩니다. 무제한 범위 해제 시 제동은 범위 설정에서 반지름을 설정한 구형 볼륨 내에서 각 벡터에 대해 적용됩니다.
- 방사형/접선
-
방사형은 제동의 영향을 받는 드래그 아이콘의 중심을 향하거나 중심에서 멀어지는 파티클 모션의 백분율을 지정합니다. 접선은 제동의 영향을 받는 드래그 아이콘의 몸체를 가로지르는 파티클 모션의 백분율을 지정합니다.
- 범위
-
제동 효과가 최대인 드래그 아이콘 중심으로부터의 거리를 시스템 단위로 지정합니다. 무제한 범위를 해제한 경우에만 유효합니다.
- 폴오프
-
선형 제동이 적용되는 방사형/접선 범위를 벗어난 거리를 지정합니다. 제동은 범위 거리에서 가장 강력하고, 폴오프 한계까지 선형적으로 줄어들며, 그 밖에서는 효과가 없습니다. 폴오프는 범위 밖에서만 유효하나 아이콘의 중앙으로부터 측정하며 항상 범위 값과 동일한 최소값을 갖습니다. 무제한 범위를 해제한 경우에만 유효합니다.
- 원통형 제동 드래그가 구 원통형 모드에서 작동할 때 해당 아이콘은 원통 안의 원통입니다. 파티클 모션은 방사형, 접선 및 축 벡터로 분할됩니다. 제동은 방사형 및 접선 백터에 대해서는 구형 볼륨 내에 적용되며 축 벡터에 대해서는 평면에 적용됩니다.
- 방사형/접선/축
-
제동은 제동의 영향을 받는 아이콘 원형 부분의 중심을 향하거나 중심에서 멀어지는 파티클 모션(방사형), 방사형 벡터를 통과하는 파티클 모션(접선) 또는 아이콘의 긴 축(축)의 길이를 따르는 파티클 모션(축)의 백분율을 프레임당 제어합니다.
- 범위
-
방사형 및 축 제동 효과가 최대인 드래그 아이콘 중심으로부터의 거리를 시스템 단위로 지정합니다. 또한 축 제동 범위를 제어하는 무한 평면의 두께도 지정합니다. 무제한 범위를 해제한 경우에만 유효합니다.
- 폴오프
-
선형 제동이 적용되는 방사형/접선/축 범위를 벗어난 거리를 지정합니다. 제동은 범위 거리에서 가장 강력하고, 폴오프 한계까지 선형적으로 줄어들며, 그 밖에서는 효과가 없습니다. 폴오프는 범위 밖에서만 유효하나 아이콘의 중앙으로부터 측정하며 항상 범위 값과 동일한 최소값을 갖습니다. 무제한 범위를 해제한 경우에만 유효합니다.
디스플레이 그룹
- 아이콘 크기
-
아이콘의 크기를 지정합니다.