O FootPlatform é o IK alvo para a pés. O movimento é crítica para a animação dos lados.
-
CATMotion Editor >
 painel de hierarquia de HubGroup > Expandir hierarquia até que o FootPlatform pertence. > Clique no controlador para editar .
painel de hierarquia de HubGroup > Expandir hierarquia até que o FootPlatform pertence. > Clique no controlador para editar .
RollPivotPos
Um CATRig FootPlatform tem uma animação de giro de posição para assegurar-se de que o pé sempre rotaciona em torno do ponto. O controlador RollPivotPos determina a posição do ponto de giro ao longo do eixo X da FootPlatform (ou de um lado a outro).
Um valor de 1.0 representa o exterior de pés e um valor de 0.0 a dentro do pé plataforma.
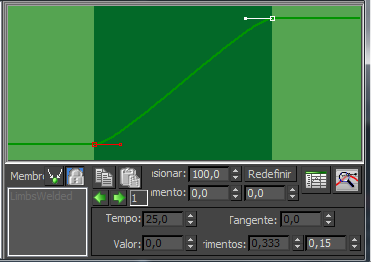
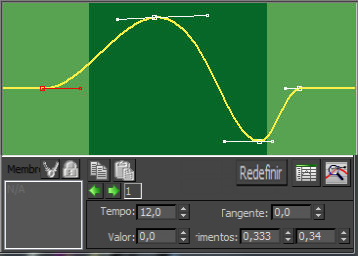
Rolo
O controlador de rotação controla a rotação da FootPlatform ao longo de seu comprimento.
Na ilustração a seguir, o rolo começa antes do pé deixa o solo e termina após o pé está no chão. Este é um cenário típico.
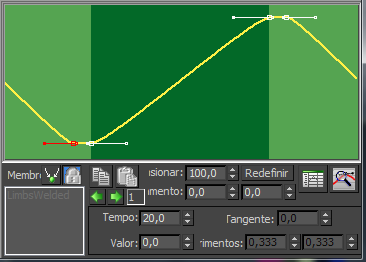
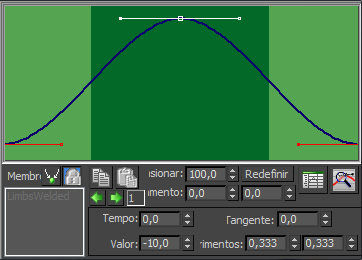
PitchPivotPos
A posição de giro FootPlatform tem uma animação para assegurar que o pé sempre rotaciona em torno do ponto desejado. O PitchPivotPos controla a posição do ponto de giro ao longo do eixo Y da FootPlatform; isto é, ao longo de seu comprimento.
Um valor de 0.0 posiciona o giro no lado interno da plataforma de pés e um valor de 1.0 posiciona o giro no canto.
Para um humano, esta configuração normalmente anima entre o canto (1.0) para elevação e o lado interno (0,0) para plantas, como mostrado na ilustração a seguir.
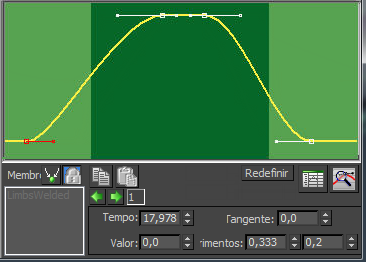
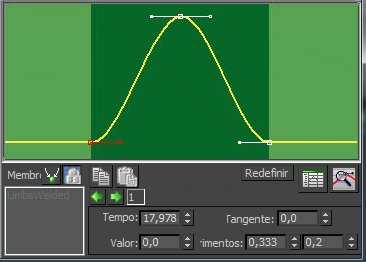
Passo
Como com a norma passo controlador, FootPlatform passo controla o ângulo da FootPlatform ao longo de seu comprimento (eixo Y). É utilizado para controlar o ângulo de pé como elevadores e slaps para baixo, como mostrado na ilustração a seguir.
FootPush
FootPush cíclica posicional é um deslocamento ao longo do eixo Y, que permite que você jogue o FootPlatform adiante durante a navegação.
Swerve
O controlador Swerve é o mesmo que o controlador WeightShift. Ele controla o side-to-side (eixo X) para a posição de ciclo FootPlatform.
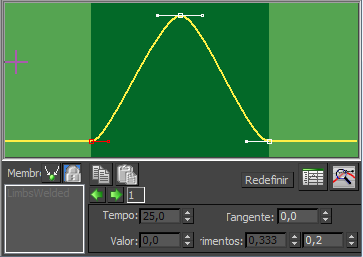
StepShape
O controlador StepShape controla a velocidade do FootPlatform como ele se move através do ar. Em outras palavras, controla a ease-in e ease-out do FootPlatform de movimento.