Aqui encontram-se os controles para configurar os limites das juntas quando o Solucionador HI for utilizado. Aqui é possível ativar ou desativar os eixos X, Y, ou Z, limitá-los e aplicar esses limites. Aqui também é onde o ângulo de preferência é definido e ajustado. O ângulo de preferência define a direção em que uma sequência irá dobrar, o ângulo para onde qual uma sequência irá rodar.
-
Crie uma sequência de ossos. > Aplique o Solucionador de HI > Selecione qualquer osso na sequência. > Abra o
 painel de Hierarquia. > Botão de cinemática inversa
painel de Hierarquia. > Botão de cinemática inversa
Use o Solucionador de HD se for necessário animar juntas deslizantes com cinemática inversa.
Procedimentos
Exemplo: Definir a direção em que uma sequência de cinemática inversa irá dobrar (ângulo de preferência):
- Vá até ao
 painel Criar, clique em
painel Criar, clique em  (Sistemas) e ative Ossos.
(Sistemas) e ative Ossos. - Ative Designar a filhos e certifique-se de que o Solucionador de HI está visível no local do nome do Solucionador.
- Na viewport de Topo, crie uma sequência de quatro ossos em linha reta.
- Ative
 e arraste o controle deslizante de tempo para o quadro 50.
e arraste o controle deslizante de tempo para o quadro 50. -
 Mova o objetivo de modo que ele fique próximo do nó de raiz.
Mova o objetivo de modo que ele fique próximo do nó de raiz. -
 Selecione qualquer osso na sequência.
Selecione qualquer osso na sequência. - No painel de Hierarquia
 painel de cinemática inversa, abra a implementação de Junta Rotacional.
painel de cinemática inversa, abra a implementação de Junta Rotacional. - Haverá três eixos. Escolha um em que o ângulo preferencial não seja zero.
- Altere o ângulo preferencial. Se ele for negativo, transforme-o em positivo.
-
 Reproduzir a animação. Alterar o ângulo preferencial pode redefinir a direção da rotação.
Reproduzir a animação. Alterar o ângulo preferencial pode redefinir a direção da rotação.
Para entender a configuração do ângulo de preferência, ajuda utilizar um exemplo simples.
Para definir os limites da junta rotacional em uma hierarquia de objetos ou em uma sequência de ossos:
- Crie uma sequência de ossos ou uma hierarquia de objetos.
- Selecione qualquer objeto na sequência.
- No painel de Hierarquia painel de cinemática inversa, abra a implementação de Junta Rotacional.
- Se quiser limitar um eixo, ative Ativo e Limitado e marque os valores De e Para. A hierarquia irá rodar na viewport. Dica: Clicar nos indicadores De e Para roda imediatamente a hierarquia para esses ângulos.
Interface
Implementação de Juntas Deslizantes
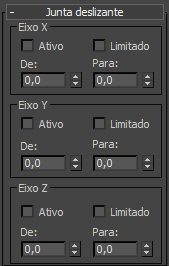
Grupos Eixo X, Y e Z
- Ativo
- Ativa um eixo (X, Y ou Z). Permite que o objeto selecionado deslize ao longo do eixo ativado.
- Limitado
- Limita a faixa de movimento permitida em um eixo ativo. Utilizado em conjunto com os giradores De e Para. A maior parte das juntas tem uma faixa de movimento limitada ao longo de um eixo ativo. Por exemplo, um pistão somente desliza ao longo do comprimento do seu cilindro.
- Giradores De e Para
- Determinam os limites da posição. Utilizados em conjunto com a função Limitado. Clicar nos indicadores De e Para move o objeto para a sua posição-limite. Use isto para verificar os limites de deslizamento de um objeto.
Implementação de Juntas Rotacionais
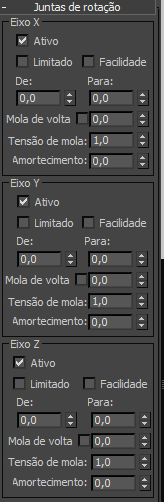
Grupos Eixo X, Y e Z
- Ativo
- Ativa um eixo (X, Y ou Z). Permite que o objeto selecionado possa girar em torno do eixo ativo.
- Limitado
- Limita a faixa de rotação permitida em um eixo ativo. Utilizado em conjunto com os giradores De e Para. A maior parte das juntas tem faixa de rotação limitada ao longo de um eixo ativo. Por exemplo, um pneu que gira em volta de um eixo pode ser limitado de forma a rodar apenas em torno desse eixo.
- Giradores De e Para
- Determinam os limites de rotação. Utilizados em conjunto com a função Limitado. Clicar nos indicadores De e Para roda o objeto até sua rotação-limite. Use isto para verificar os limites de rotação de um objeto.
- Ângulo preferencial
- Usado pelo Solucionador HI para marcar a pose inicial, para os cálculos internos. Determina a direção preferencial da rotação de um osso.