多点约束 (MPC) 是在分析中将不同的节点和自由度连接到一起的高级功能。当常规边界条件无法提供正确行为时,多点约束常用于仿真边界条件效应。
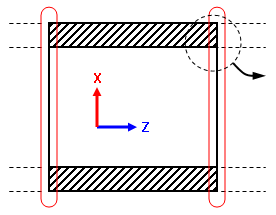
MPC 的用途之一是主从情况:节点 X(从属节点)处的位移需要与节点 Y(主节点)处的位移相同。在图 1 中,对长容器的一部分进行了建模。左侧使用对称边界条件,这将限制模型的 Z 平动并仿真左侧的储罐部分。对于长容器,模型右侧的储罐部分将强制这些节点保留在平面中。对称边界条件适用,但阻止储罐轴向增长或收缩的条件除外。此时,MPC 用于指示所有节点的 Z 位移都相等(但不一定是 0)。同样,MPC 可以热分析中的温度和静电分析中的电压为依据。
|
局部图: |
|||
| Z 对称条件限制左侧面。这些节点不会在 Z 方向上移动。 | MPC 条件会将右侧面限制为保持在一个平面内,节点将在 Z 方向上一起移动。 | 如果没有 MPC 或其他边界条件,则载荷将导致右侧面上的节点自由变形。这样无法准确地仿真未包含在分析中的容器部分。 | ||
| 图 1:多点约束的使用 | ||||
多点约束的输入是使用以下格式的方程:
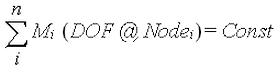
其中
- i 是方程的第 i 项
- M i 是方程的项 i 的乘子
- DOF@Node i 是项 i 的特定节点处的自由度 (DOF)。自由度的类型取决于分析类型(线性结构分析为平动或转动位移,热分析为温度,静电分析为电压)。
- n 是方程中的项数
- Const 是通过方程得出的常数。此值通常为零。
如果方程涉及任何单位,则使用“模型单位”写入。MPC 方程不使用“显示单位”。
输入 MPC 方程
- 在“FEA 编辑器”中,写下 MPC 方程所需的顶点编号和关联的自由度。若要获取顶点编号,请使用“选择”
 “选择”“顶点”选择一个顶点,单击鼠标右键,然后选择“查询”。(或者,只需将鼠标指针悬停在顶点上,即会在工具提示中显示其属性。)
“选择”“顶点”选择一个顶点,单击鼠标右键,然后选择“查询”。(或者,只需将鼠标指针悬停在顶点上,即会在工具提示中显示其属性。) - 对于所有支持的分析类型,“多点约束”命令均位于功能区的“设置”选项卡中。
- 对于线性结构分析,该命令位于“约束”面板的下拉部分中。
- 对于热分析,该命令位于“热载荷”面板的下拉部分中。
- 对于静电分析,该命令位于“载荷”面板的下拉部分中。
“多点约束”。使用“定义多点约束”对话框可输入上面的方程的所有项。 - 单击“添加”按钮以创建新的约束方程;系统将自动填充方程的名称。或者使用“方程名称”下拉菜单选择现有方程以进行编辑。
- 在“常数”字段中指定方程的常数。(上面的方程中的 Const。)
- 使用“添加行”按钮根据需要向电子表格添加多个行以指定方程中的各项。在每行中,输入“乘子”和“顶点 ID”(在步骤 2 中写下的顶点编号)以及相应的 DOF(自由度)。使用线性分析的可用下拉列表。对于热分析和静电分析,自由度是固定的(自由度分别为“温度”和“电压”)。 注: 如果将顶点指定给局部坐标系,则选定的“自由度”也位于该局部坐标系中。例如,X 平动是指柱坐标系中的径向平动方向,Y 平动是指切向方向等。
- 选择“求解方法”并设置“罚函数乘子”(罚函数乘子用于“罚函数”方法)。可以从以下求解方法中选择:
- 自动
- 罚函数方法
- 压缩方法
注: 可以在相应的“设置”主题中找到建议的“罚函数”乘子值。搜索“罚函数乘子”可快速访问相关主题。注: 您在“定义多点约束”对话框中选择的求解方法将成为含 MPC 的所有特征将使用的方法。这些特征包括但不限于:循环对称、无摩擦约束、智能粘合和用户定义的 MPC。例如,如果要使用“罚函数方法”对涉及智能粘合的所有分析求解,则可在“定义多点约束”对话框中选择“罚函数方法”,以替代默认的压缩方法。 - 单击“确定”按钮关闭对话框。
- 运行分析。
兼容性说明:版本 20 到 20.4 SP1
不再兼容版本 20 到 20.4 SP1 中用于存储 MPC 数据的输入。若要恢复原始输入,请编辑位于设计工况文件夹(例如 modelname.ds_data\1)中的文件 DS.CST.BAK。这样可以得到原始 MPC 方程。节点编号需要转换为对应的顶点编号,然后需要通过“添加”“多点约束”重新输入方程。.CST.BAK 文件的格式如下所示:
| #_equations, max_n | 两个数:文件中的方程数 (#_equations) 和任意方程中的最大项数(max_n,不包括通过方程得出的常数)。两个数必须都是整数。 |
| #_terms(1) | 方程 1 中的项数。该数必须是整数。 |
|
node(1)、DOF(1)、M(1) node(2)、DOF(2)、M(2) node(3)、DOF(3)、M(3) node(#_terms)、DOF(#_terms)、M(#_terms) |
每行三个数,共有 #_terms 行。这三个数分别是节点编号 (node(i)),节点的自由度 (DOF(i)) 和项的乘子 (M(i))。乘子必须是实数,其他两个数必须是整数。DOF(i) 有效数字如下所示: 1 = X 平动 2 = Y 平动 3 = Z 平动 4 = X 转动 5 = Y 转动 6 = Z 转动 |
| Constant(1) | 方程 1 的常数值。此数必须是实数。(1.00 或 1.0E0,而不是 1) |
| 每个 MPC 方程(从数字 2 到 #_equations)都具有上面三行 [#_terms;node(i)、DOF(i)、M(i);Constant]。 |
示例
分析图 2 中的齿轮系。请使用“多点约束”,而不是尝试使用梁单元对齿轮进行建模以模拟转动连接。对于齿轮,半径 1 * 转动 1 = - 半径 2 * 转动 2。因此 MPC 方程为“半径 1 * 转动 1 + 半径 2 * 转动 2 = 0”。对于给定的尺寸和顶点编号,MPC 的输入如下所示:
方程 1
常数 = 0
| 乘子 | 顶点 ID | 自由度 |
|---|---|---|
| 3 | 12 | X 转动 |
| 9 | 18 | X 转动 |
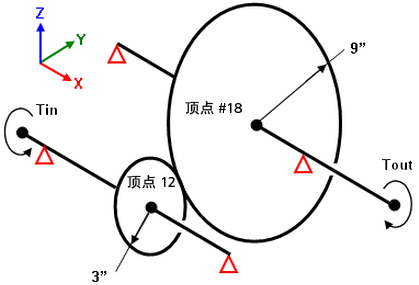
图 2:使用梁单元分析齿轮系