本页面阐述使用原生 Simulation Mechanical(SimMech) 求解器运行的非线性模拟中通用面对面接触的摩擦参数。这些参数位于“接触选项”对话框的“摩擦”选项卡中。仅当您激活“常规”选项卡下的“包含摩擦”选项时,才会显示此选项卡。
在无摩擦的接触中,单元刚度矩阵是对称矩阵。如果存在摩擦,矩阵将变成不对称矩阵。使用不对称求解器的计算成本高于使用对称求解器的成本。为了提高效率,MES 强制单元刚度对称,以便使用对称求解器求解摩擦接触。
如果在分析中考虑摩擦接触,则求解过程极易受到滑动过程的干扰和影响。接触表面开始滑动后,滑动之前的平衡状态将不再有效,处理器必须在求解过程中尝试找到新的平衡状态。此外,对称近似可能会导致收敛效果不佳。每个可用的摩擦定律选项都会尝试以不同的方式控制求解不稳定性。
从位于“摩擦力”选项卡顶部的下拉菜单中选择所需的“摩擦定律:”。有三种选项可用于 Simulation Mechanical 中的非线性面对面接触:
- 修正的库仑摩擦
- 库仑与粘性摩擦
- Smooth Coulomb friction
在随后的子部分中将讨论每个摩擦定律及其适用的参数。
修正的库仑摩擦
此摩擦定律使用经典摩擦算法:库仑摩擦。在基础库仑摩擦模型中,两个接触表面在发生相对滑动之前,可以承受一定大小的剪切应力(由摩擦系数和法向接触压力决定)。库仑摩擦模型如下定义:τ = μ,其中 μ 是摩擦系数,P 是法向接触压力。当使用“修正的库仑摩擦”定律时,您必须定义下列三个参数:
- 静摩擦系数 (μs)
- 滑动摩擦系数 (μd)
- 切向刚度比
理想情况下,剪切应力超过 μsP(通过“静摩擦系数”输入得出)后,两个表面将开始滑动。此外,剪切应力将变为 μdP,此时使用的是“滑动摩擦系数”值。
从数字上很难实现理想情况(剪切应力超过静态值之前无运动),如图 1 所述。因此,在使用此摩擦定律时需要定义“切向刚度比”。“切向刚度比”是切向接触刚度 (Kt) 与法线方向接触刚度 (K) 之间的比值,这在“高级”选项卡下进行定义。(请参见本页的“‘高级’选项卡”部分。)切向刚度越大,精度越高,但所需迭代也越多。切向刚度越小,提供的收敛效果越好(运行时间越短),但可能会降低精确度。建议的值范围是 0.01 到 1。鉴于静摩擦系数会变大,建议使用较小的切向刚度比。
|
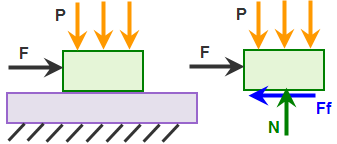
(a) 模型和顶部块体的自由体受力图。作用力 F 随时间不断增大,直到超过静摩擦力。 |
|
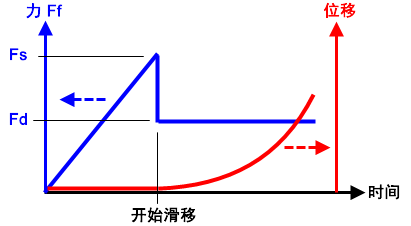
(b) 摩擦力 Ff 与时间的关系图(蓝色曲线)和位移与时间的关系图(红色曲线)。摩擦力 Ff 达到静摩擦力限值 (Fs = μs * N) 前,部件不运动。超过静摩擦力后,摩擦力 Ff 将从 Fs 下降到 Fd (= μd * N),部件开始加速。 |
|
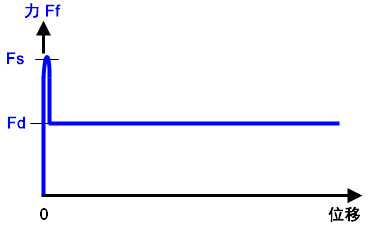
(c) 组合 (b) 中的图形以显示摩擦力与位移的关系。理想情况下,在摩擦力达到 Fs 后才会发生位移,之后便开始滑动。从数字上来说,这种情况很难实现,因为只要存在位移即暗示摩擦力为 Fd。 |
|
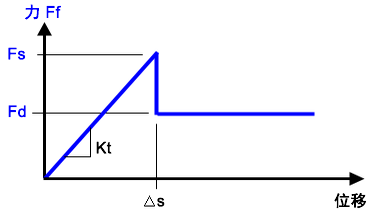
(d) 为了避免 (c) 中的数值不稳定性,当摩擦力小于静态限值 (Fs) 时,允许部件出现小幅度位移 (Δs)。运动量通过切向刚度 (Kt = Fs/Δs) 控制。较小的 Kt 值允许部件在开始滑动前移动较大的位移且更易于收敛;而较大的 Kt 值(较陡的斜坡)允许部件在开始滑动前移动较小的位移且难以收敛。切向刚度的计算公式为切向刚度比 x 法线方向的刚度。 |
| 图 1:修正的库仑摩擦的切向刚度 |
库仑与粘性摩擦
与修正的库仑摩擦定律不同,库仑与粘性摩擦定律不会同时考虑静摩擦系数和动摩擦系数。在“修正的库仑摩擦”定律中,需要相对较大的力来克服静摩擦并开始运动。滑动开始后,摩擦力将降低,因为滑动摩擦系数小于静摩擦系数。因此,摩擦力突变将造成力的不连续性。在“库仑与粘性摩擦”定律中,滑动开始后不会出现摩擦力不连续。相反,随着滑动速度不断增加,摩擦力将逐渐变大。
必须为“库仑与粘性摩擦”选项定义两个参数:
- 滑动摩擦系数 (Fd):此项也称为动摩擦系数。它是保持相对运动所需的切向力与接触部件之间的法向力之比。例如,如果需要 15N 的切向力才能保持块体沿相邻部件滑动,且二者之间的法向接触力为 100N,则滑动摩擦系数为 15N / 100N = 0.15。对于此摩擦定律,应根据速度相对较低的滑动计算滑动摩擦系数。
- 粘性摩擦系数 (νf):这是摩擦力斜率与滑动速度的关系曲线。克服粘滞效应所需的力与速度成比例,这适用于所有粘滞效应。

图 2:摩擦力与滑动速度的关系(库仑与粘性摩擦)
在图 2 中,摩擦力 (Ff) 曲线定义如下:
Ff = Fd + νf Vt
其中
Fd 为动(滑动)摩擦力,
νf 为粘性摩擦系数,
Vt 是两个部件之间的切向(滑动)速度。
如果 νf = 0,则 Ff = Fd
Smooth Coulomb friction
与“库仑与粘性摩擦”定律一样,“Smooth Coulomb friction”定律仅考虑滑动摩擦系数。这消除了使用“修正的库仑摩擦”定律时静态和滑动条件之间出现的摩擦力不连续性。静态和滑动条件之间的过渡将因包含平滑过渡因子 (Φ) 得到进一步稳定。
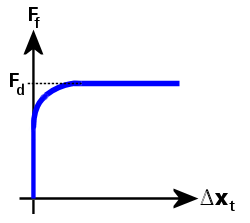
图 3:摩擦力与切向相对位移的关系(平滑库仑摩擦)
在图 3 中,摩擦力 (Ff) 曲线定义如下:
Ff = Fd Φ,
Φ = tanh(3 Δxt / δ)
其中
Fd 为动(滑动)摩擦力。
Φ 是过渡因子,它可使得摩擦力随着切向相对位移逐渐接近零而平滑地接近零。同样,它可使得摩擦力随着切向相对位移逐渐增加而平滑地接近动摩擦力。
Δxt 是切向相对位移,
δ 是基于接触刚度和动摩擦力计算的容差。