本页面阐述使用原生 Simulation Mechanical(SimMech) 求解器运行的非线性模拟中通用面对面接触的高级参数。这些参数位于“接触选项”对话框的“高级”选项卡中。
“参数”部分
“参数”部分中的前两个选项(单选按钮)用于指定分析中随时可能出现的常规接触类型。此选择可控制自动接触刚度计算的行为。在某些情况下,选项显而易见。在其他情况下,可能不清楚接触是低速还是高速。区别是求解效率不同。任一选择都应提供精确的结果。可用的选项如下所示:
低速接触(挤入式):接触对之间的接触特点是两个部件缓慢接触(低速)或部件持续进行接触(挤入)。可以使用自适应接触刚度程序,但默认不使用。
高速接触(碰撞):接触对之间的接触特点是发生高速变化,例如碰撞或坠落测试。同样,默认不使用自适应接触刚度程序,但该程序在某些情况下可能会很有用。
接触类型:将接触描述为“面对面”接触在一定程度上会产生误解。事实上,“面对面”接触是指某一部件/表面上的节点与另一部件/表面的单元面发生接触,从而防止表面穿透(除了“点对点”接触选项)。此“节点对面”接触既可以是单向的(仅次要节点接触主要面),也可以是双向的(主要节点也接触次要面)。选择以下四个选项之一:
- 自动:(这是默认选项。)处理器将根据沿涉及的接触表面的网格和材料模型在“点对面”和“面对面”接触之间进行选择。处理器还将确定用作主接触面的表面。(处理器可以在分析开始之前切换第一个和第二个部件/表面。)但是,如果分析中出现大变形,则“自动”选项可能无法选择最佳接触类型。在这种情况下,请检查求解器所选的设置的有效性。选择的接触类型(以及每个部件中的单元数)会在日志文件中列出。如果处理器切换第一个和第二个部件/表面,这也会在日志文件中列出。
- 面对面:当次要部件上的节点尝试穿过主要部件的表面时,此选项指示发生接触,反之亦然。此接触类型类似于使用 Nastran 求解器的“常规(对称)”接触。
- 点对面:仅当次要部件上的节点尝试穿过主要部件的表面时,此选项才指示发生接触。主要部件/表面上的节点可以自由穿过次要表面。此接触类型类似于使用 Nastran 求解器的“常规(不对称)”接触。
- 点对点:如果两个表面具有匹配的网格且其间的相对滑动可忽略不计,则此方法为最佳方法。当次要部件上的节点尝试通过主要部件上的节点时,此选项指示发生接触;不检测主要部件的节点和表面之间的接触。无论部件如何移动,接触力将始终存在于连接在一起的原始节点对之间。创建“点对点”接触后,“结果”环境将显示模型中的其他部件:一个“接触”单元部件对应一个“点到点”接触对。
提示: “点对点”接触将创建相同的单元类型,以便用户可以通过在节点之间绘制直线并指定接触单元类型手动进行创建。区别在于由“点对点”选项创建的接触单元的初始长度可以为零,并且可以在其长度为 0(零)时开始接触。无法以零长度绘制手动创建的接触单元,如果长度为 0(零),将无法开始接触。
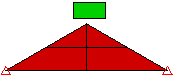
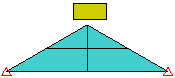
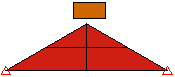
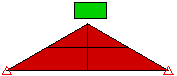
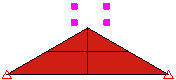
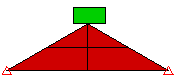
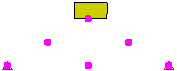
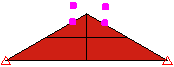
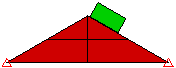
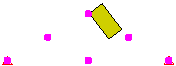
“点对面”方法的速度比“面对面”方法要快。但需要清楚的是,当使用“点对面”接触时,主要部件上的点可以穿过次要部件的表面。“面面”接触可提供更好的接触检测功能,但会生成更多的接触单元。有关不同接触类型的比较行为,请参见图 1。
| 面面接触 |
“点对面”接触(块是主要部件,楔形体是次要部件) (点在块的楔形体接触面上) |
“点对面”接触(楔形体是主要部件,块是次要部件) (点在楔形体的块接触面上) |
|---|---|---|
|
|
|
| 时间 = 0: | ||
等效系统。两个部件的表面通过接触连接。 |

等效系统。仅楔形体上的节点与接触有关。 |
等效系统。仅块体上的节点与接触有关。 |
| 时间 = 0.024 秒: | ||
块体的表面与楔形体的表面/节点接触。 |
块体的表面与楔形体的节点接触。 |
在块体的节点与楔形体的表面接触后,才会发生接触。楔形体穿过块体。 |
| 时间 = 0.12 秒: | ||
块体的表面沿楔形体的表面向下滑动。 |
块体从楔形体的节点之间穿入。 |
块体卡在楔形体上。 |
| 时间 = 0.15 秒: | ||

|

|
|
|
图 1:接触类型比较 块体落到楔形体上的三个模型。每个模型均使用不同的接触类型。 |
||
“接触刚度”部分
默认情况下,求解器会使用以下方程自动计算接触刚度:

其中
- fs 是比例参数,默认值为 0.1。
- E 是接触对中两种材料的较小杨氏模量。
- A 是接触线长度与厚度(二维)或接触面积(三维)的乘积。
- V 是单元面积与厚度(二维)或单元体积(三维)的乘积。
比率 A2/V 是针对主要表面和次要表面的单元计算的。对于面面接触类型,使用该比率值的平均值。对于其他接触类型,使用主要表面的比率值。对于涉及梁或桁架单元的接触,此比率使用值 1.0。
用户定义:激活此选项将覆盖自动接触刚度。
刚度:激活“用户定义”选项后,此输入字段将可用。采用力全长的单位在字段中输入适当的值。
其他刚度:如果出现表面穿透,则在此字段中添加的可选刚度将添加到“刚度”值。请参见图 2。

图 2:接触刚度和接触距离
当两个表面之间的距离小于“接触距离”(S) 时,表示它们互相接触。如果小于此距离,则每个单元的接触力与压缩量(S – 距离)和“接触刚度”(K) 成正比。当距离减小到 0 时,部件开始相互穿过(穿透)。随后,接触力与接触刚度加“附加接触刚度”(Ka) 和穿透量成正比。如果表面之间的距离达到“最大渗透距离”(P),则接触力为零,且渗透不再受阻。
通常,接触刚度的值应介于两种接触材料中较软材料的杨氏模量值的 1% 到 10% 之间(对于“单位”网格尺寸)。对于过大或过小的网格尺寸,可能需要分别相应地小幅增加或减小该百分比。如果假设的刚度太低,则会出现过度接触渗透。如果刚度太高,则可能导致接触振动和不稳定。
估计接触刚度的另一种方法是将接触单元视为两个表面的节点之间的一组弹簧。如果接触力已知(即便仅知道近似值),则接触刚度的计算公式为 K = (F/n)/Δ;其中,F 是接触力,n 是互相接触的节点数,Δ 是接触单元为抵制力 F/n 而压缩的量。请记住,接触单元需要进行一定程度的压缩才能产生力,因此选择 Δ 为 10% 接触距离 (S),这是一个很好的起点。但实践证明,此方法仅对包含常规几何图元的简单接触模型较为实用。
在第一步后使用自适应接触刚度方法:激活此复选框后,系统将在分析期间自动调节接触刚度,从而提高精确度并改善收敛效果。接触刚度可根据接触状态(穿透、无穿透、振动)对接触作用加以调整。此方法在某些情况下可提供更为精确和有效的解。但是,如果模型涉及相对移动较快的或含非线性材料模型的部件之间的接触,则可能需要禁用此选项。
若刚度太小,则节点不可避免将大幅度渗透主表面。若刚度太大,则可完全满足接触区域中的几何边界条件,但平衡迭代往往处于不稳定状态。接触刚度值较高会导致全局刚度矩阵处理不当,从而降低收敛性。
“接触距离”部分
默认情况下,处理器计算距模型几何体的接触距离。接触距离是将发生接触的表面之间的距离。(请参见图 2。)如果两个表面之间小于此距离,将应用“接触刚度”。
用户定义:激活此选项将覆盖自动接触距离。
接触距离:在此字段中输入适当的值。例如,如果在块体和壳部件之间出现接触,则接触距离将设置为壳单元厚度的一半(由于网格位于壳单元表示的总厚度的中间)。
如果接触距离大于表面之间的初始间隙,则会产生干涉(仅限“面对面”和“点对面”接触)。在尝试分隔体的分析开始时产生接触力。在这种情况下,时间步在分析开始时通常会减少,直到部件达到新平衡为止。
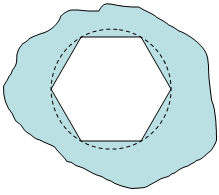
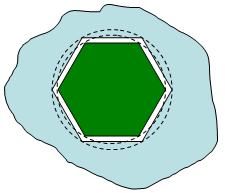
对于间距较近的活动部件(例如,孔内部的轴或销轴),需要注意一些特别事项。从数学角度来说,部件之间的间隙可能会小于物理间隙。数学间隙由网格尺寸和表面近似值确定。物理间隙基于部件尺寸。随着近似表面移动或转动,可能产生现实中并不存在的干涉。(请参见图 3。)
|
1. 部件中的孔 |
在划分网格后变成多边形。 |
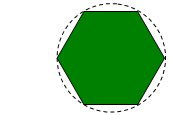
|
2. 圆销 |
在划分网格后变成多边形。 |
|
3. 组合,两个部件可能在某些位置拟合(无干涉) |
但在其他位置干涉(即使物理部件存在间隙)。其原因在于表面近似。 |
| 图 3:划分部件网格时的间隙和干涉更改 | |


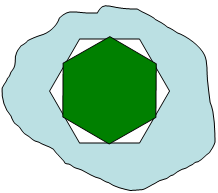
如果要在两个已划分网格的部件之间形成与物理部件相同的间隙(或干涉),您可能需要调整部件尺寸和接触距离。这些尺寸与网格尺寸相关,如图 4 中所示。
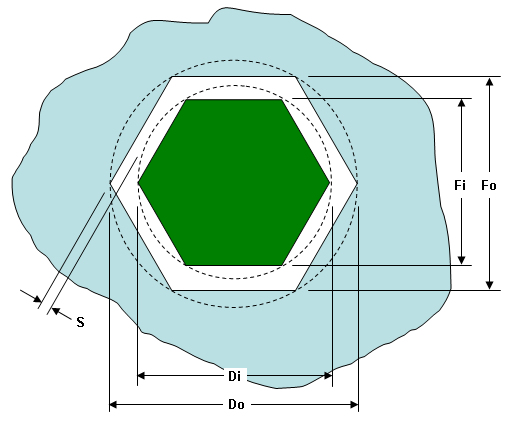
图 4:避免干涉的销和孔的关系
通过基本几何体,用户可以将直径 D 与平面 F 中的尺寸关联,如下所示:
![]()
为了避免干涉拟合,请根据以下规则设置尺寸:
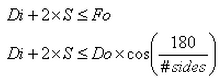
其中:
- D、Di 和 Do 是物理尺寸(实际或理论尺寸)
- F、Fi 和 Fo 是平面中的尺寸(由于网格近似)
- # sides 是周长的边数或单元数。如果周长的网格均匀,则此值显而易见。如果网格不均匀(例如,使用网格细化点时),则 # sides 是根据边(或单元)数得出的假设值(如果整个周长使用最粗网格)。或者,您可以在网格中测量最大尺寸 Fo。
- S 是销的角点与孔的平面之间的数学间隙。如果将面面接触距离设置为等于该尺寸,则销和孔的某些位置上无间隙。
例如,假设 2.010 英寸直径的孔内有一个 2 英寸直径的销,且每 40 个单元划分一个网格。数学间隙 S = 0.0019 英寸;该值远远小于每条边上的理论间隙 0.005 英寸。若要使 0.005 英寸间隙加上 0.002 英寸接触距离得出 S = 0.007 英寸,内径必须为 1.9898 英寸。