本页面阐述使用原生 Simulation Mechanical(SimMech) 求解器运行的非线性模拟中常规面对面接触的几何体参数。这些参数位于“接触选项”对话框的“几何体”选项卡中。
“几何参数”部分
接触作用距离:此参数可用于加速计算过程。仅当两个表面的距离小于指定的值时,才会考虑接触。因此,如果处理器确认两个部件相距很远,则可以避免检查部件是否接触的时间步。需要注意的是,部件不会在不同的时间步之间以过远的距离移动。因为这样可能会使部件在任一计算步骤中都处于非接触状态,即便部件实际在相邻的时间步之间彼此穿过也是如此。在这种情况下,不会检测到接触。请参见图 1。若值为零(默认值),则接触距离等于部件表面单元的最大尺寸。这一假设适用于大多数情况,但可能不适用于高速应用程序。
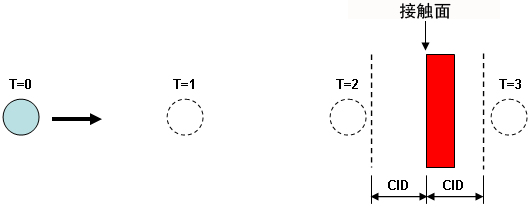
图 1:接触作用距离
将在四个时间步(T=0、1、2 和 3)中显示一个快速移动的球体。仅当体在彼此的接触作用距离(尺寸 CID)之内时,才会检查到接触。在此示例中,球体在所有时间步均已超出接触作用距离,因此未检测到它穿过块这一实际情况。
最大渗透距离:当次要部件表面上的某一节点超出指定距离但位于主要部件表面下方时,不进行表面接触。(接触力归零。)此条目用于防止在次要表面上的点(位于主要表面下方)之间进行虚拟接触。如果此条目的值为零,则处理器将使用表面单元的最大尺寸作为其局部最大渗透距离。对于此条目,建议用户尽量不要使用除零之外的其他任何值。如果在成功检测到接触的同时发生过度渗透,最好增加接触刚度而不是最大渗透距离。
最大初始距离:如果部件相对于彼此大幅移动,则自动接触更新(在“面对面接触”主对话框中)是帮助处理器确定哪些点实际上在每个时间步处于接触状态的最佳选项。但在部件相对于彼此几乎没有运动的情况下,如果用户可以最大程度地减少生成的接触单元数,则可提高分析速度。如果单元之间的最初间距超出“最大初始距离”,则不会产生接触。因此,无论两个单元经过移动后离得多近,它们之间也不会发生接触。这将限制检查的接触数,从而提高分析速度。
设想一下轭和连接叉内部的销。如果销相对于轭未转动,则销的左侧不会与孔的右侧接触。因此,如果最大初始距离设置为较小距离(例如,一个单元的尺寸),则创建刚好所需的接触单元,将销连接到相邻节点的孔。其结果将得到一个较小的模型,并减少检查接触单元状态的次数,从而提高分析的运行速度。
- “接触单元更新”选项(在“常规接触设置”对话框中)设置为“从不”,或
- “接触类型”选项(在“接触选项”对话框的“高级”选项卡中)设置为“点对点”。
对于其他设置,此字段处于禁用状态。
如果值为 0.0,则“接触单元更新”设置为“从不”时,Simulation Mechanical 将应用自动值,该值等于网格尺寸的两倍。(自动值不适用于“点对点”接触)。无论是使用自动值还是过小的用户定义值,都可能会导致缺少接触作用。要避免缺少接触,建议使用 0.0 以外的值。
延伸接触单元侧面:面对面接触作用区域可视为单元表面的延伸(沿垂直于单元面的方向向外延伸)。如果表面是凸面,则此延伸接触作用区域会保留两个相邻单元之间的间隙。相邻部件上的节点既可以在不检测到接触的情况下穿透这些间隙,也可以卡在两个单元之间。当节点在接触两个相邻单元之间交替变换时,可能导致接触颤动。(请参见图 2a。)从以下三个选项中选择:
- 自动:如果选择此选项,则接触单元边界将自动略微延伸,以考虑这些间隙。(请参见图 2b。)如果选择“自动”选项,则处理器将检测何时需延伸接触表面长度以及延伸的距离。
目标接触节点
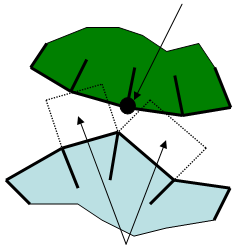
两个接触区域
(高度放大)
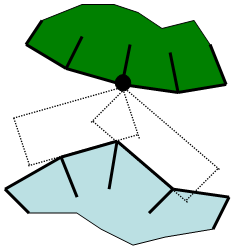
两个延伸的接触区域。
(a) 若不延伸接触单元,则两个单元之间的接触不如目标节点划过表面那般光滑。 (b) 若延伸接触单元,则接触区域比目标节点从一个接触单元滑到下一个单元更光滑。 图 2:延伸接触面 - 避免:此选项用于防止接触表面被延伸。
- 平滑:非平滑接触表面会导致两个问题。其中,平滑度表示法线方向在两个相邻单元之间的变动幅度。第一个问题是收敛性较差,第二个是结果不理想。如果两个相邻单元不共面(例如,在曲面上),则目标节点穿过单元边界时,接触力的法向矢量会突然改变方向。只要考虑离散几何,这种情况就不可避免。这种非平滑可能导致单元边界发生振动,且目标节点被卡在单元边界。
若要最大程度地减少此类情况,请从“延伸接触单元侧面”下拉菜单中选择“平滑”选项。选择此选项可激活“平滑系数”输入字段。
- 平滑系数:可将平滑系数视为在两个单元的拐点(或相同单元的两边)处放置一个圆角。(有关说明,请参见图 3。)平滑系数是一个介于 0(无平滑)到 0.5(过渡区域延伸到单元边的一半)之间的值。
请注意,两个不同接触表面之间的接合处不会出现平滑。它仅出现在每个接触表面的范围内。
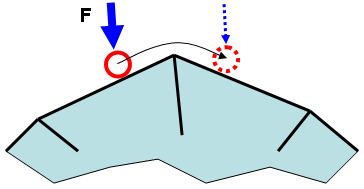
(a) 从左向右移动时,力 F 迫使另一个体(未显示)上的目标节点(红色圆)接触。随着该节点从一个单元移动到下一个单元,反作用力的方向急速改变,这可能导致难以收敛。
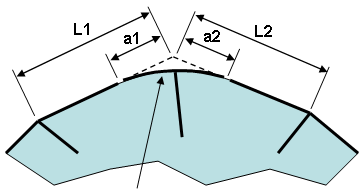
平滑过渡
(b) 通过激活“平滑”选项,将消除锐角。因此,在节点(为清晰起见已删除)从左向右移动时,反作用力的方向平稳变化。距离 a1 和 a2 的计算方法如下所示:
a1 = 平滑系数 * L1
a2 = 平滑系数 * L2
图 3:平滑接触表面
请记住,面对面接触始终会检查一个表面上的节点是否会穿过另一个表面上的单元面。因此,表面 A 上的节点将与平滑表面 B 接触,表面 B 上的节点将与平滑表面 A 接触。确切地说,平滑表面 A 不会与平滑表面 B 接触。
“接触单元更新参数”部分
搜索半径:指定半径,以便每次更新接触单元时在该半径范围内创建它们。仅当在“常规接触设置”对话框的“接触单元更新”选项卡中选择“用户定义的接触单元更新频率”选项时,此字段才可用。尽管用户定义的接触单元更新频率是全局参数,但是必须为每个接触对分别定义搜索半径。