El cuadro de diálogo de Límites del eje de herramienta controla las limitaciones angulares de la trayectoria de la máquina que, por tanto, limitan el ángulo en el que es posible posicionar la herramienta cuando se cortan trayectorias multiaxiales.
Seleccione el comportamiento cuando los límites angulares no se alcanzan o se sobrepasan:
- Eliminar trayectorias — Elimina la trayectoria exterior al límite angular.
- Dejar herramienta en el límite del eje — Mantiene el eje de herramienta en el límite de la máquina cuando se alcanzan límites angulares.
Configure el ángulo acimut y de elevación:
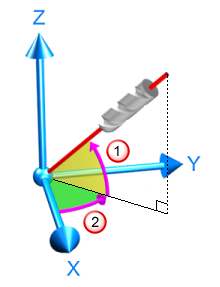
 A continuación se representa el ángulo de elevación, que es el ángulo que desde la proyección ortogonal del vector del eje de herramienta sobre el plano XY hacia el eje Z positivo, va hasta el vector del eje de herramienta. Su valor está entre -90 y 90 grados.
A continuación se representa el ángulo de elevación, que es el ángulo que desde la proyección ortogonal del vector del eje de herramienta sobre el plano XY hacia el eje Z positivo, va hasta el vector del eje de herramienta. Su valor está entre -90 y 90 grados.
 A continuación se representa el ángulo acimut, que es el ángulo que desde el eje X positivo hacia el eje Y positivo, va hasta la proyección ortogonal del vector del eje de herramienta sobre el plano XY. Su valor está entre 0 y 360 grados.
A continuación se representa el ángulo acimut, que es el ángulo que desde el eje X positivo hacia el eje Y positivo, va hasta la proyección ortogonal del vector del eje de herramienta sobre el plano XY. Su valor está entre 0 y 360 grados.
Ángulo de elevación — Define límites angulares de la máquina herramienta sobre el plano acimut; 0 es el plano acimut, 90 es a lo largo del eje perpendicular al plano acimut.
Ángulo acimut — Define los límites angulares de la máquina herramienta en el plano acimut.
Proyectar al plano — Similar a asignar al ángulo de elevación un valor de cero. Como el ángulo de elevación es fijo, normalmente se genera una trayectoria de 4 ejes. Si el eje Z del bloque no está alineado con un eje de rotación de la máquina herramienta, podría generarse una trayectoria de 5 ejes.
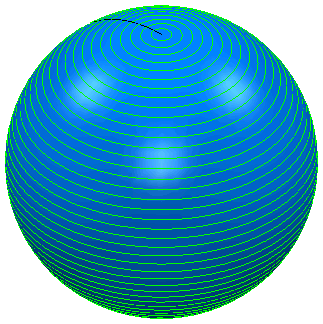
En el ejemplo siguiente se expone cómo transponer los límites angulares en la máquina herramienta a los límites de Acimut y de Elevación. Estos ejemplos utilizan esferas con trayectorias de proyección de isolíneas o líneas de flujo. Cuando no existen límites del eje de herramienta, se visualiza la siguiente trayectoria: