Используйте этот раздел вкладки 4-осевая или 5-осевая, чтобы указать, каким образом FeatureCAM следует автоматически наклонять ось инструмента, чтобы избежать столкновений между хвостовиком и патроном сборки инструмента и моделью.
Нет наклона — Это настройка по умолчанию и означает, что хвостовик и патрон не проверяются на зарезы.
Наклон — Если обнаружено столкновение, ось инструмента перемещается от исходной оси в направлении наклона, пока столкновение не будет исключено.
Атака — Если обнаружено столкновение, ось инструмента перемещается от исходной оси в направлении атаки, пока столкновение не будет исключено.
Атака, затем наклон — если обнаружено столкновение, инструмент отклоняется от исходной оси в направлении атаки, пока столкновение не будет предотвращено. Если столкновения невозможно избежать с помощью наклона инструмента в направлении Атаки, то инструмент будет наклоняться в направлении Наклона, пока столкновение не будет предотвращено.
Наклон, затем атака — Если обнаружено столкновение, инструмент отклоняется от исходной оси в направлении Наклона, пока столкновение не будет исключено. Если столкновения невозможно избежать с помощью наклона инструмента в направлении Наклона, то инструмент будет наклоняться в направлении Атаки, пока столкновение не будет предотвращено.
К точке — Если обнаружено столкновение, инструмент выравнивает режущую кромку по направлению к заданной точке, чтобы стать Осью инструмента, направленной к точке, пока столкновение не будет исключено.
От точки — Если обнаружено столкновение, инструмент выравнивает режущую кромку по направлению от заданной точки, чтобы стать Осью инструмента, направленной от точки, пока столкновение не будет исключено.
К нормали поверхности — Если обнаружено столкновение, ось инструмента будет перемещаться от исходной оси в направлении нормали поверхности, пока столкновение не будет исключено.
В этом простом примере использована растровая траектория вдоль Х на ступеньке, чтобы показать эффект предотвращения столкновения. Если вы создаете простую растровую траекторию, то получаете столкновения хвостовика при подъеме или спуске со ступеньки:
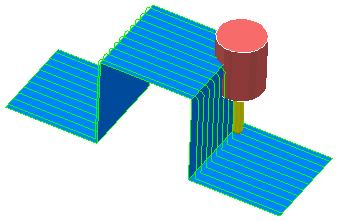
Одним из способов решения этой проблемы является увеличение длины инструмента. Другим способом является изменение стратегии. Третьим способом является использование Предотвращения столкновений. В этом случае исходная Ось инструмента - Вертикальная. Выберите Наклон оси для предотвращения зарезов - Атака.
Создайте новую растровую траекторию. Видно, что теперь траектория отклоняется на отвесных участках, чтобы предотвратить столкновение патрона:
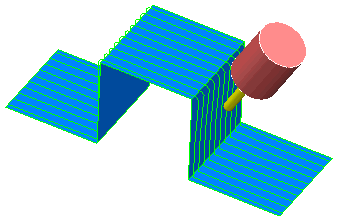
Однако, траектория все еще 3-осевая на плоских участках, где нет столкновений патрона:
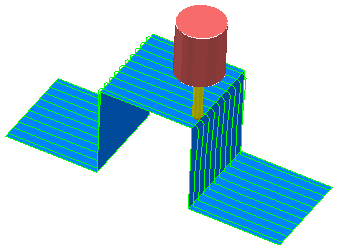
Таким образом, инструмент пытается учитывать исходное определение оси инструмента, насколько это возможно. Когда это невозможно, ось инструмента изменяется в направлении, заданном в поле Ось наклона инструмента, пока сборка инструмента не перестанет зарезать.
Атака, затем наклон
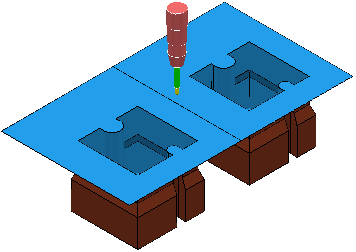
Модель в следующем примере может быть обработана с помощью 5-осевой непрерывной обработки:
Отклонить ось и Наклон не создают траекторию в углах  :
:
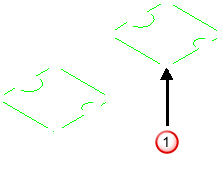
Заданное направление, Отклонить ось и От кривой создают незаконченную траекторию.
|
|
|
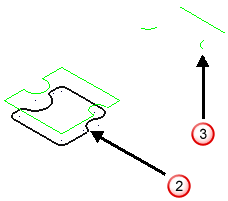
 - кривая, используемая для создания траектории.
- кривая, используемая для создания траектории.
 - незаконченная траектория.
- незаконченная траектория.
Единственным способом решения этой проблемы было бы создание кривой на каждом кармане и генерирование отдельной траектории для каждого кармана.
Отклонить ось и Атака, затем наклон достигают желаемого результата с одной траекторией, то есть нет необходимости создания дополнительной геометрии.