En el fichero .mtd pueden incluirse componentes estáticos, como un portaherramientas, para poder verificar su colisión.
Al incluir un componente estático en la detección de colisiones, PowerMill reconoce que el componente no tiene eje de movimiento y solo verifica si presenta colisiones con los componentes del eje (los componentes en movimiento de la máquina herramienta, incluida la mesa rotatoria) y no con otros componentes.
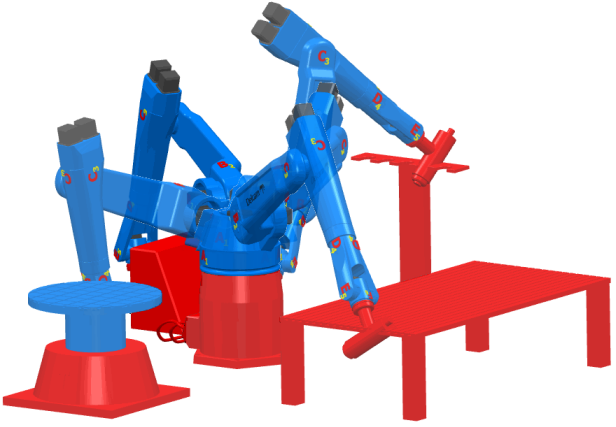
En este ejemplo se muestra cómo añadir los siguientes componentes para que se incluyan en la detección de colisiones:
- Control del robot

- Portaherramientas

- Tabla

- Base de la mesa rotatoria

- Base del robot


Debe especificar un atributo NAME para cada uno de los componentes estáticos, ya que PowerMill verifica la posibilidad de colisiones en los componentes que contienen un atributo NAME.
- Abra el fichero Robot_cell.mtd en un editor XML. En este ejemplo se utiliza Notepad++.
Dentro del fichero .mtd, cada componente estático se define en su propia sección (a la que se hace referencia como elementos principales en XML). Cada componente estático se identifica mediante un comentario, por ejemplo: <!-- El controlador es estático -->, seguido del elemento secundario <machine_part>.
- Edite el elemento <machine_part> asociado con el controlador introduciendo el atributo NAME="RobotCellController", de modo que el elemento sea como este: <machine_part NAME="RobotCellController">.
- Edite el elemento <machine_part> asociado con el portaherramientas introduciendo el atributo NAME="RobotCellTool", de modo que el elemento sea como este: <machine_part NAME="RobotCellTool">.
- Edite el elemento <machine_part> asociado con la tabla introduciendo el atributo NAME="RobotCellTable", de modo que el elemento sea como este: <machine_part NAME="RobotCellTable">.
- Edite el elemento <machine_part> asociado con la base de la mesa rotatoria introduciendo el atributo NAME="RotaryTableBase", de modo que el elemento sea como este: <machine_part NAME="RotaryTableBase">.
- Edite el elemento <machine_part> asociado con la base del robot introduciendo el atributo NAME="RobotBase", de modo que el elemento sea como este: <machine_part NAME="RobotBase">.
- Guarde el fichero .mtd.
A continuación, se verifican las colisiones en cada componente estático.