Este es un ejemplo ligeramente más complejo que el Ejemplo de evitar colisión básica. Utiliza una trayectoria a Z constante en el modelo bucket.dgk de la carpeta de Ejemplos. La trayectoria se limita al interior del cubo.
- Haga clic en la pestaña de Editar trayectoria > panel de Editar > Eje de herramienta para mostrar el cuadro de diálogo de Eje de herramienta. En la pestaña de Definición:
- seleccione un Eje de herramienta de tipo Vertical.
- seleccione Auto evitar colisiones.
- En la pestaña de Evitar colisiones, configure lo siguiente:
- Inclinación — Lateral
- Distancia de seguridad de la caña — 1.0
- Distancia de seguridad portahtas — 3.0
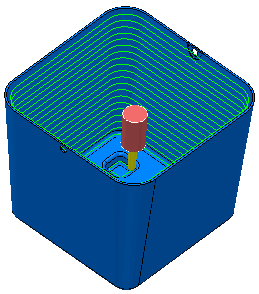
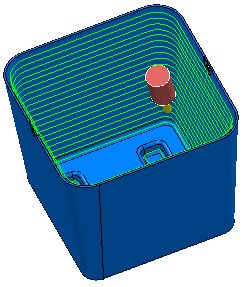
- Cree una trayectoria a Z constante, la herramienta comienza vertical.
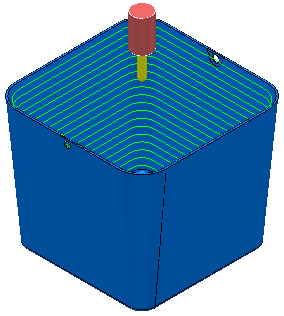
Después se aplica un ángulo de inclinación lateral para que el portaherramientas se separe del modelo.
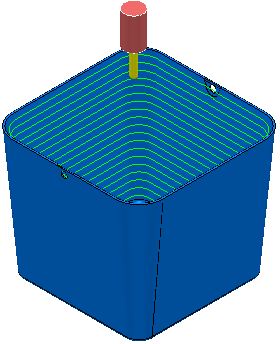
A medida que la trayectoria desciende sobre el modelo, el ángulo lateral cambia para que el portaherramientas se separe del modelo:
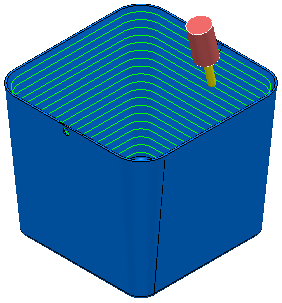
Y así sucesivamente hacia la parte inferior del modelo: