Puede dividir un grupo de colisión existente dentro de una cadena cinemática en múltiples grupos de colisión que pueden verificarse entre sí para determinar posibles colisiones.
La cadena cinemática es la sección de un fichero .mtd que contiene la información que define el comportamiento de los componentes del eje (las piezas móviles) de una máquina herramienta o, en este caso, un robot.
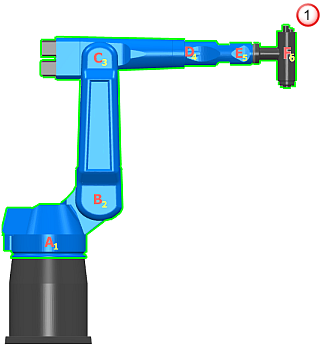
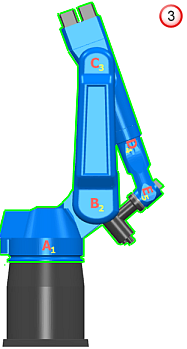
A menudo, los componentes del eje de una máquina herramienta se agrupan en un grupo de colisión. Esto significa que para el siguiente robot  , con sus componentes de eje en un grupo de colisión
, con sus componentes de eje en un grupo de colisión , PowerMill no reconoce esta orientación del robot (como muchas otras orientaciones) como una colisión
, PowerMill no reconoce esta orientación del robot (como muchas otras orientaciones) como una colisión  .
.

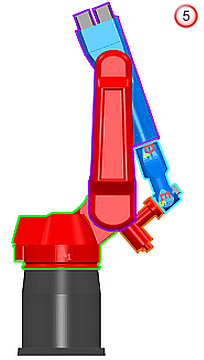
Al dividir el grupo de colisión en múltiples grupos de colisión, puede verificar los componentes del eje de colisión uno contra el otro. Con el grupo de colisión dividido en varios grupos de colisión  , PowerMill ahora reconoce la misma orientación del robot como colisión
, PowerMill ahora reconoce la misma orientación del robot como colisión  .
.

Para detectar posibles colisiones, PowerMill comprueba estos componentes de eje:
- A con C, D, E y F.
- B con D, E y F.
- C con A, E y F.
- D con A, B y F.
- E con A, B y C.
- F con A, B, C y D.
Para obtener más información, consulte División de un grupo de colisión.