この例では、Robot_One_CGroup.mtd ファイルの干渉グループを 4 つの干渉グループに分割する方法について説明します。
PowerMill で名称属性のすべての軸コンポーネントに新しい干渉グループを作成する場合、A、B、D、F の軸コンポーネントの名称属性を指定する必要があります。
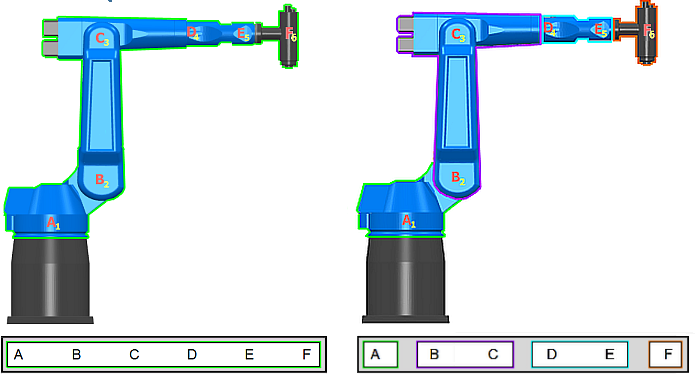
名称属性の指定されていない軸コンポーネントは、名称属性が指定されている前の軸コンポーネントに関連する干渉グループに含まれます。軸コンポーネント C および E に名称属性を指定しない場合、C は B と同じ干渉グループ、E は D と同じ干渉グループに含まれます。
干渉グループを次の 4 つの干渉グループに分割します。
- XML エディタで Robot_One_CGroup.mtd を開きます。この例では NotePad ++ を使用します。
コメント <! --The arm is controlled by 6 rotary axes --> はキネマティック チェインの開始を表します。コメントの下では、ロボットを構成する 6 つの軸コンポーネントが独自のセクションで定義されます (XML 言語で親要素と呼ばれる)。
各軸コンポーネント セクションは子要素 <machine_part>
 から始まります。セクションで軸アドレス
から始まります。セクションで軸アドレス  ごとに定義する軸コンポーネントを識別できます。
ごとに定義する軸コンポーネントを識別できます。

- 属性 NAME="Shoulder" を入力して、A 軸に関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="Shoulder"> のようになります。
- 属性 NAME="Upperarm" を入力して、B 軸に関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="Upperarm"> のようになります。
- 属性 NAME="Forearm" を入力して、D 軸に関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="Forearm"> のようになります。
- 属性 NAME="Head" を入力して、F 軸に関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="Head"> のようになります。
C および E の軸コンポーネントの <machine_part> 要素に名称属性を指定する必要はありません。
- .mtd ファイルを保存します。
<machine_part> 要素の名称属性を入力して、既存の干渉グループを 4 つの干渉グループに分割します。
- Shoulder (A 軸コンポーネントを含む)
- Upperarm (B と C 軸コンポーネントを含む)
- Forearm (D と E 軸コンポーネントを含む)
- Head (F 軸コンポーネントを含む)