キネマティクス チェイン内の既存の干渉グループを相互に干渉チェックできる複数の干渉グループに分割できます。
キネマティクス チェインとは、ロボットなどのマシンの軸コンポーネント (可動パーツ) の動作を定義する情報が含まれた .mtd ファイル内のセクションです。
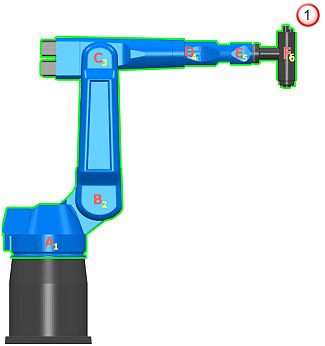
多くの場合、マシンの軸コンポーネントは 1 つの干渉グループにまとめられます。つまり、次のロボット  の場合、1 つの干渉グループ
の場合、1 つの干渉グループ  の軸コンポーネントとすると、PowerMill はロボットの方向を (他の多くの方向のように) 干渉
の軸コンポーネントとすると、PowerMill はロボットの方向を (他の多くの方向のように) 干渉  として認識しません。
として認識しません。

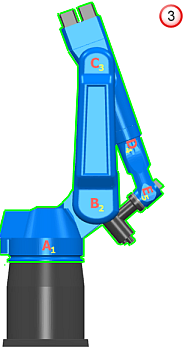
この干渉グループを複数の干渉グループに分割すると、他のグループに対して軸コンポーネントの干渉をチェックできます。複数の干渉グループ  に分割することで、PowerMill は、ロボットの同じ方向を干渉
に分割することで、PowerMill は、ロボットの同じ方向を干渉  として認識できるようになります。
として認識できるようになります。

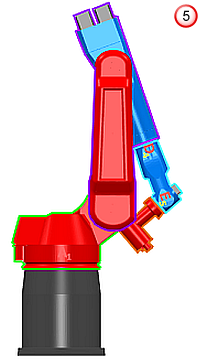
注: 各グループ内のコンポーネントが他の干渉グループのコンポーネントと干渉する可能性があるため、単一の干渉グループは 4 つの干渉グループに分割されます。B は C と、D は E と干渉しないため、B と C や D と E をさらに小さいグループに分割する必要はありません。また、各干渉グループで PowerMill による干渉チェックに時間がかかるため、干渉グループを細かく分割しないことをお勧めします。
注: 多くの場合、2 つの隣接する軸コンポーネント間の結合部のモデリングの正確性不足が原因で、PowerMill は 2 つの隣接する軸コンポーネント間の干渉を登録するため、PowerMill は隣接する軸コンポーネントの干渉をチェックしません。また、隣接ルールは、隣接する別の干渉グループの軸コンポーネントにも適用されます。
PowerMill は次のように軸コンポーネントの干渉をチェックします。
- C、D、E、F に対して A
- D、E、F に対して B
- A、E、F に対して C
- A、B、F に対して D
- A、B、C に対して E
- A、B、C、D に対して F
詳細については、干渉グループを分割 を参照してください。