工具ホルダーなどの固定コンポーネントを .mtd ファイルに追加すると、干渉チェックが実行されます。
干渉チェックに固定コンポーネントを追加すると、PowerMill は、固定コンポーネントに動作軸がないことを認識し、軸コンポーネント (回転テーブルなどの加工工具の可動コンポーネント) に対してのみ干渉チェックを実行します。他の固定コンポーネントはチェックしません。
注: PowerMill がそれに照らして工具ホルダーをチェックする、一部の軸コンポーネントは不要です(工具ホルダーや回転テーブルなど)。これは、回転テーブルは移動しますが、2 つのコンポーネントが干渉することは絶対にないためです。PowerMill がそのような干渉シナリオの干渉チェックに時間をかけないようにするには、.mtd ファイル内の除外リストにシナリオを追加します。
この例では、次のコンポーネントを追加することにより、干渉チェックを実行できるようにする方法について説明します。
- ロボット コントロール

- 工具ホルダー

- テーブル

- 回転テーブルのベース

- ロボットのベース

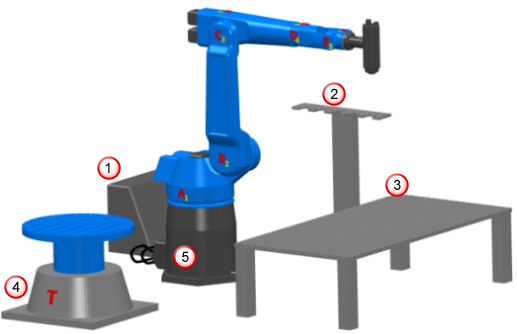
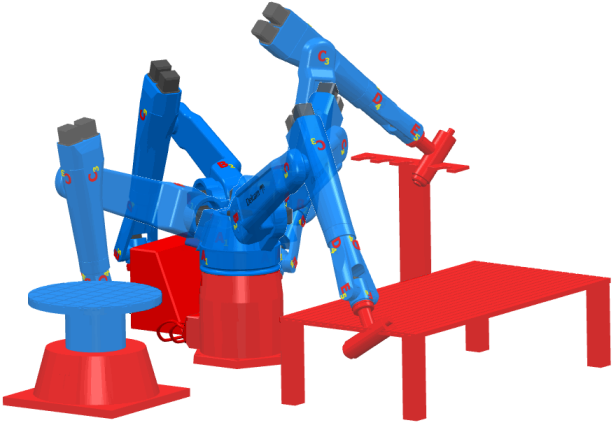
注: PowerMill は固定コンポーネントを灰色で、軸コンポーネントを青色で表示します。
PowerMill が名称属性の指定されたコンポーネントの干渉チェックを実行するため、各固定コンポーネントの名称属性を指定する必要があります。
- XML エディタで Robot_cell.mtd ファイルを開きます。この例では NotePad++ を使用します。
.mtd ファイル内では、各固定コンポーネントは独自のセクションで定義されています (XML では親要素と呼ばれている)。各固定コンポーネントは次のようなコメントで識別されます。<!-- The controller is static --> の後に子要素 <machine_part> が続きます。
- 属性 NAME="RobotCellController" を入力して、コントローラに関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="RobotCellController"> のようになります。
- 属性 NAME="RobotCellTool" を入力して、工具ホルダーに関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="RobotCellTool"> のようになります。
- 属性 NAME="RobotCellTable" を入力して、テーブルに関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="RobotCellTable"> のようになります。
- 属性 NAME="RotaryTableBase" を入力して、回転テーブルのベースに関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="RotaryTableBase"> のようになります。
- 属性 NAME="RobotBase" を入力して、ロボットのベースに関連付けられた <machine_part> 要素を編集すると、要素は <machine_part NAME="RobotBase"> のようになります。
- .mtd ファイルを保存します。
各固定コンポーネントの干渉チェックが実行されるようになりました。