В этом примере рассмотрено, как разбить группу столкновений в файле Robot_One_CGroup.mtd на четыре группы.
Необходимо задать атрибут NAME для осевых компонентов A, B, D и F, так как PowerMill создает новую группу столкновений для каждого осевого компонента с атрибутом NAME.
Осевые компоненты без атрибута NAME включаются в группу столкновений, связанную с предыдущим осевым компонентом, имеющим атрибут NAME. Так как не задан атрибут NAME для осевых компонентов С и Е, то С включается в ту же группу, что и В, а Е в ту же группу, что и D.
Разделение группы столкновений на четыре группы:
- Откройте файл Robot_One_CGroup.mtd в редакторе XML. В этом примере используется редактор NotePad ++.
Комментарий <! --The arm is controlled by 6 rotary axes --> обозначает начало кинематической цепи. Под комментарием определены шесть осевых компонентов, составляющих робот, в собственном разделе (называется родительским элементом в языке XML).
Каждый раздел осевого компонента начинается с дочернего элемента <machine_part>
 . Вы можете определить, какой осевой компонент определяет раздел, по адресу оси
. Вы можете определить, какой осевой компонент определяет раздел, по адресу оси  .
.

- Отредактируйте элемент <machine_part>, связанный с осью А, введя атрибут NAME="Shoulder", чтобы в результате элемент выглядел следующим образом: <machine_part NAME="Shoulder">.
- Отредактируйте элемент <machine_part>, связанный с осью В, введя атрибут NAME="Upperarm", чтобы в результате элемент выглядел следующим образом: <machine_part NAME="Upperarm">.
- Отредактируйте элемент <machine_part>, связанный с осью D, введя атрибут NAME="Forearm", чтобы в результате элемент выглядел следующим образом: <machine_part NAME="Forearm">.
- Отредактируйте элемент <machine_part>, связанный с осью F, введя атрибут NAME="Head", чтобы в результате элемент выглядел следующим образом: <machine_part NAME="Head">.
Элементы <machine_part> для осей C и E не должны иметь атрибута NAME.
- Сохраните файл .mtd.
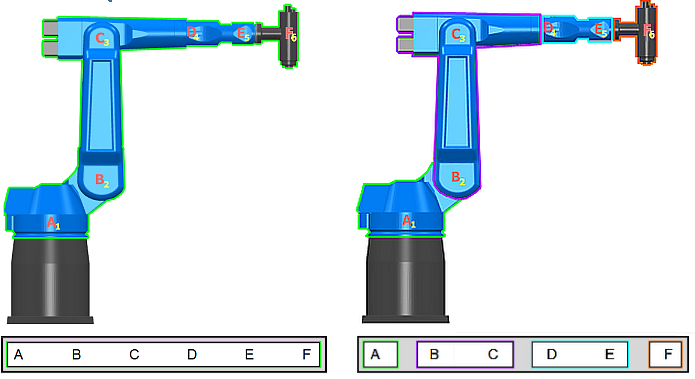
Введя атрибуты NAME в элементы <machine_part>, вы разбили существующую группу столкновений на четыре группы:
- Shoulder (содержит осевые компоненты A)
- Upperarm (содержит осевые компоненты B и C)
- Forearm (содержит осевые компоненты D и E)
- Head (содержит осевые компоненты F)