Это более сложный вариант базового примера предотвращения столкновений. Здесь используется траектория С постоянной Z и модель bucket.dgk из папки Examples. Траектория ограничена только внутренней частью корзины.
- Выберите вкладку «Правка траектории» > панель «Правка» > «Ось инструмента», чтобы открыть диалоговое окно Ось инструмента. На вкладке Определение:
- выберите Ось инструмента - Вертикально.
- выберите Автоматическое предотвращение столкновений.
- На вкладке Предотвращение столкновений задайте следующее:
- Метод наклона — Наклон
- Зазор хвостовика — 1.0
- Зазор патрона — 3.0
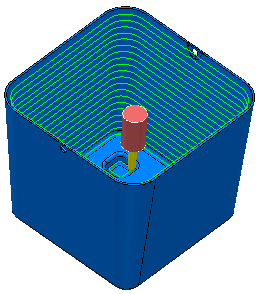
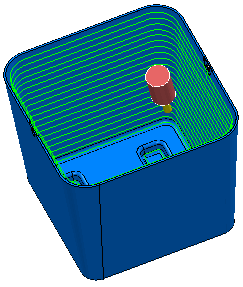
- Создадим траекторию с постоянной Z, сначала ось инструмента направлена вертикально.
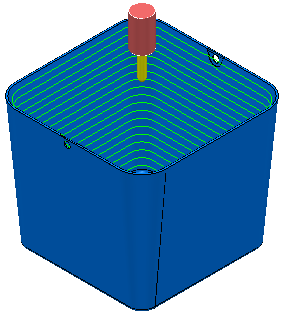
Затем применяется угол наклона и инструмент начинает отклоняться, а патрон не задевает модель.
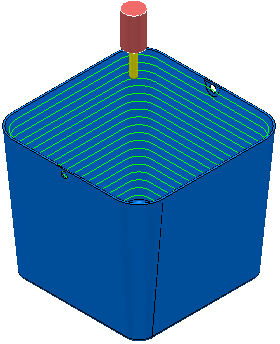
По мере углубления в деталь угол наклона меняется, чтобы избежать столкновения патрона с моделью:
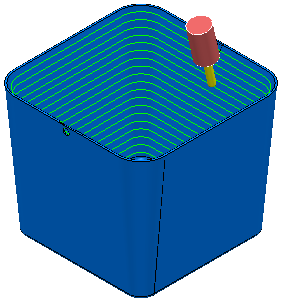
И так далее вниз по модели: