新特性:2020
每个联接类型都可以完全定义选定零部件的位置和运动。您可以选择末端、中点或中心点几何图元(包括槽的中心点)来定义联接。您还可以使用“锁定”和“保护”设定联接关系条件。
提示: 最常见的联接类型是刚性联接,它可以定位零部件并删除所有自由度。焊接和螺栓联接即为刚性联接示例。
在功能区上,使用“装配”选项卡  “关系”面板
“联接”
“关系”面板
“联接”
 以在两个零部件之间放置联接。
以在两个零部件之间放置联接。
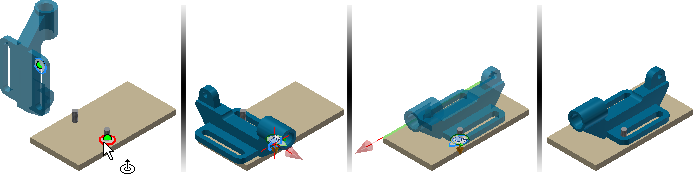
使用“联接”定位零部件并定义运动
首先,在部件文件中装入零部件。
- 启动“联接”命令。
默认联接类型为“自动”。“自动”将基于以下规则确定联接类型:
- 如果选定的两个原点为圆形,则为“旋转”联接。
- 如果选定的两个原点是圆柱上的点,则为“圆柱”类型。
- 如果选定的两个原点是球体上的点,则为“球”类型。
- 对于所有其他原点选择,则为“刚性”联接。
注: 不能使用选择规则指定滑块联接。
 选择移动零部件上的原点。
提示: 在所需的零部件亮显后,单击 Ctrl 键以仅限于选择该零部件。
选择移动零部件上的原点。
提示: 在所需的零部件亮显后,单击 Ctrl 键以仅限于选择该零部件。-
将直接从几何图元推断出默认原点选择。对于无法直接推断的原点,请从关联菜单中进行选择:
- 若要在 2 个面之间创建接头原点,请选择“在两个面之间”,然后通过选择两个面和一个点指定两个面之间的虚拟中点。
- 若要创建接头原点并按照距原点的偏移距离放置它,请选择“偏移原点”。拖动操纵器箭头或输入偏移值以更改原点位置。选择要与原点对齐的参考几何图元。
 选择固定零部件上的原点。
选择固定零部件上的原点。
- 如果需要,更改联接类型。
 如需要,使用“翻转零部件”来反转零部件的正方向。
如需要,使用“翻转零部件”来反转零部件的正方向。
 如果需要,请选择“对齐 1”,然后拾取以下项目之一来指定对齐方向:
如果需要,请选择“对齐 1”,然后拾取以下项目之一来指定对齐方向:
- 移动零部件上的平面、点或边。
- 从浏览器或图形窗口(如果可见)中拾取工作平面/工作轴/工作点。如果“对齐 1”是点选择(草图点或工作点),则“对齐 2”也必须是点选择。
 如果需要,请选择“对齐 2”,并在固定零部件上进行选择以指定对齐方向。
如果需要,请选择“对齐 2”,并在固定零部件上进行选择以指定对齐方向。
 若要更改对齐方向,请选择“反转对齐方式”。
若要更改对齐方向,请选择“反转对齐方式”。
- 单击“应用”或“确定”以完成操作。
使用“限制”定义运动范围
若要定义限制:
- 创建或编辑联接。
- 打开对话框。并单击“限制”选项卡。
提示: 如果该对话框不可用,请按小工具栏上的三个点,以显示该对话框。
可用的“角度”或“线性”选项取决于联接类型。例如,旋转联接支持角度限制,但不支持线性限制。
注: “限制”不适用于刚性联接。 - 设定所需的“开始”值、“当前值”和“结束”值。
- 单击“确定”。
在浏览器中,具有定义限制的关系标记有 +/- 符号。
“锁定”或“保护”联接
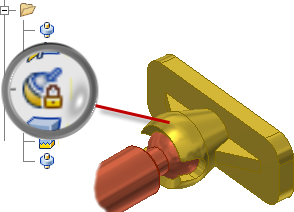
- 锁定关系可以保持当前的位置。锁定不同于固定零部件。固定操作将消除所有自由度,并固定零部件在空间中的位置。锁定操作可以消除所有运动,但允许零部件在相关零部件移动时更改位置。
- 保护关系可以针对添加的关系是否妨碍要求的自由度发出警告。
“锁定”或“保护”关系:
- 在浏览器中找到该关系。
- 在该关系上单击鼠标右键,然后从关联菜单中选择“锁定”或“保护”。
- 若要删除条件,请清除复选标记。
注: “锁定”和“保护”不适用于约束。