子部件通常会在设计中使用若干次。将子部件的每个引用都设置为柔性状态,以便每个引用可以具有不同的位置。
注: 如果子部件或子部件中的零件是自适应的,那么启用柔性会自动关闭自适应性。
- 创建包含所需自由度的部件。将部件放置在上级部件中。
- 在图形窗口或浏览器中,在放置的子部件上单击鼠标右键,然后选择“柔性”。父部件中提供了子部件中允许的移动的自由。在浏览器中,将有一个图标标明该子部件处于柔性状态。
- 根据需要,继续选择子部件并设置为柔性零部件。
- 单击“保存”在部件文件中保留柔性状态。各个零部件文件不受影响。
要删除柔性状态,请在柔性子部件上单击鼠标右键,然后清除复选标记。
提示:
- 如果启用柔性后在父部件中不允许所需的移动,请打开子部件并检查关系。
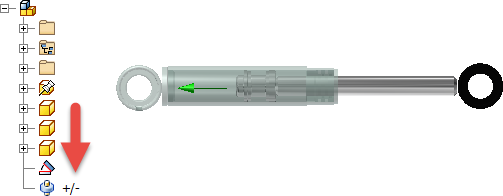
- 使用联接或约束限制来代替接触集合以在子部件中设置允许的移动。接触集合需要计算,而限制不需要。例如,可以为下图中的气缸联接设置范围从 0 mm 到 116 mm 的行程限制。当在父部件中应用了柔性,而没有启用接触集合或消耗额外计算时间时,将实施该规则。