Dies ist ein etwas komplexeres Beispiel von Grundlegendes Kollisionsvermeidungsverfahren – Beispiel. Es verwendet den Konstante Z-Werkzeugweg im bucket.dgk-Modell im Beispiele-Ordner. Der Werkzeugweg ist auf die Innenseite der Tasche begrenzt.
- Klicken Sie auf die WKZ-Wegeditor-Registerkarte > Ändern-Gruppe > Werkzeugachse, um das Dialogfeld Werkzeugachse zu öffnen. Auf der Definition-Registerkarte:
- Wählen Sie eine Werkzeugachse des Typs Vertikal aus.
- Wählen Sie die Option Automatische Kollisionsvermeidung aus.
- Stellen Sie auf der Kollisionsvermeidung-Registerkarte Folgendes ein:
- Werkzeugachsen-Schwenkart — Neigungswinkel
- Schaft-Sicherheitsbereich – 1.0
- Halter-Sicherheitsabstand – 3.0
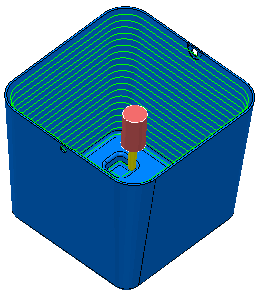
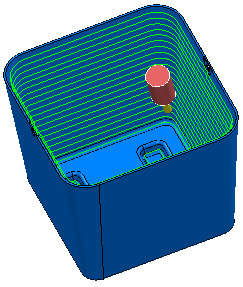
- Erstellen Sie einen Konstante Z-Werkzeugweg. Das Werkzeug beginnt in vertikaler Ausrichtung.
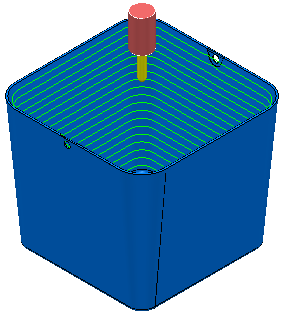
Daraufhin wird ein Neigungswinkel angewendet, sodass der Werkzeughalter nur das Modell schlichtet.
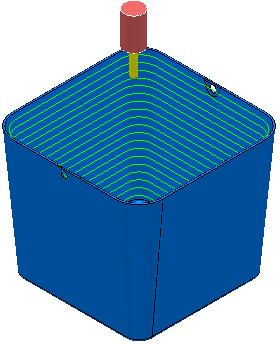
Wenn der Werkzeugweg entlang des Modells fortfährt, wechselt der Neigungswinkel so, sodass der Werkzeughalter nur das Modell schlichtet:
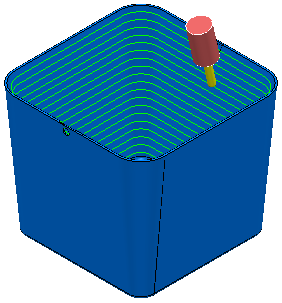
Dieser Vorgang wird das Modell hinunter wiederholt: