The Link constraint causes an object to inherit the position, rotation, and scale of its target object. In effect, it allows you to animate a hierarchical relationship, so that the motion of an object to which the Link constraint is applied can be controlled by different objects in the scene throughout an animation.
The Link constraint enables the robot arms to pass a ball.
For example, you can use the Link constraint to pass a ball from one hand to another. Assume that at frame 0 the ball is in a character’s right hand. The hands are animated to meet at frame 50, when the ball passes to the left hand, and then spread apart until frame 100. You accomplish this by assigning the Link constraint to the ball, with the right hand as its target at frame 0, changing to the left hand as target at frame 50.
Procedures
Example: To assign the Link constraint and animate links:
-
 Go to frame 0.
Go to frame 0. - In the Top viewport, create a sphere, a cylinder and a box.
-
 Select the sphere.
Select the sphere. - Open the
 Motion panel.
Motion panel. - Expand the Assign Controller rollout.
- Select the Transform: Position/Rotation/Scale controller.
- Click
 (Assign Controller).
(Assign Controller). - Choose Link Constraint.
This changes the Transform entry to Transform: Link Constraint and adds a child controller named Link Params: Position/Rotation/Scale, which becomes the immediate parent of the individual transform tracks. It also adds a controller track named Link Times: LinkTimeControl.
The purpose of the LinkTimeControl controller is to expose the Link constraint keys in the track bar so they can be manipulated there.
You can also assign the Link constraint from the Animation menu
 Constraints submenu.
Constraints submenu. It is recommended that you apply Link To World before linking to any target objects. This allows you to animate the object on its own, before the first link to a target object takes place.
- On the Link Params rollout, click Link To World.
This adds a World entry at frame 0 in the link list on the Link Params rollout.
- Drag the time slider to frame 1.
- Click Add Link and select the cylinder.
The cylinder becomes a target and is added to the link list. The Link constraint relationship is now active between the sphere and the cylinder.
- Click Add Link again to turn it off.
- Drag the time slider to frame 50.
- Turn on
 and move the cylinder a good distance away from where it is.
and move the cylinder a good distance away from where it is. -
 Play the animation.
Play the animation. The sphere follows the cylinder as it moves. The sphere is link-constrained.
- Select the sphere.
- Drag the time slider to frame 25.
- On the Motion panel Link Param rollout, click Add Link, select the box, and turn off Add Link.
You have now added another target that becomes active at frame 25.
- Turn off
 and play the animation. The sphere is linked to the cylinder from frame 0 to 24, so it follows the cylinder until frame 25, at which point it links to the box.
and play the animation. The sphere is linked to the cylinder from frame 0 to 24, so it follows the cylinder until frame 25, at which point it links to the box. - With the sphere selected, right-click one of the keys on the track bar and open the Delete Key submenu.
Notice the “Sphere01: Link Times” item. This is a special key made accessible on the track bar by the LinkTimes: LinkTimeControl controller. You can use these keys to modify link animation directly on the track bar, like regular animation keys, by dragging them on the time line or deleting them. However, unlike other animation keys, they cannot be cloned by Shift+dragging them.
To access the Link constraint’s parameters through the Motion panel:
- Select the Link-constrained object.
- On the Motion panel, expand the Link Params rollout, if necessary.
Interface
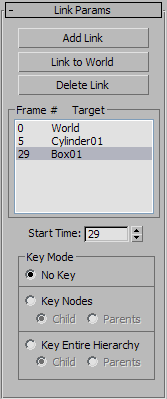
Once you assign a Link constraint, you can access its properties on the Link Params rollout in the Motion panel. In this rollout you can add and delete targets and animate the time at which each target becomes the active parent of the constrained object.
You can also modify the animation of link frames by manipulating the keys on the track bar and in Track View. However, standard methods for deleting keys in those contexts do not apply to link keys; you must use the Delete Link function on the Link Params rollout instead.
- Add Link
- Adds a new link target.
After clicking Add Link, set the time slider to the frame at which to activate the link, and then select the object to link to. You can continue adding links as long as Add Link is on; to exit this mode, right-click in the active viewport or click Add Link again.
- Link to World
- Links the object to the world (the scene as a whole).
We recommend this be the first target in the list. This prevents the object from reverting to its independent creation or animation transforms if other targets are deleted from the list.
- Delete Link
- Removes the highlighted link target. Once a link target is removed, it will no longer influence the constrained object.
- [target list]
- Shows the link target objects.
- Start Time
- Assign or edit the frame value of a target.
When you highlight a target entry in the list, Start Time shows the frame at which the object becomes a parent. To change when the link transfer takes place, adjust the value.
Tip: You can also modify the animation of link frames by manipulating the keys on the track bar and in Track View.
Key Mode group
- No Key When chosen, no keyframes are written to the constrained object or its targets. The link control happens without inserting any keys.
- Key Nodes When chosen, keyframes are written to the specified option. There are two options: Child and Parents. Child sets a keyframe only on the constrained object. Parents sets keyframes for the constrained object and all of its targets.
- Key Entire Hierarchy Sets keyframes up the hierarchy for the specified option. There are two options: Child and Parents. Child sets a keyframe only on the constrained object and its parents. Parents sets keyframes for the constrained object, its targets, and their upper hierarchy.