The output of every CATMotion controller is a combination of different factors. For example, the end result of FootPlatform  Lift is a combination of Max Step Time, Max Stride Length, the velocity of the Path Node, and the values you assign to all the individual controllers for the FootPlatform.
Lift is a combination of Max Step Time, Max Stride Length, the velocity of the Path Node, and the values you assign to all the individual controllers for the FootPlatform.
The curve you see on the FootPlatform Lift panel is useful for helping to create the result you want in the animation for that controller, but you can also see the actual result in Track View.
Procedure
Example: To view the output curves for a FootPlatform:
-
 Select the element in the viewport.
Select the element in the viewport. This example uses the FootPlatform, but the basic procedure applies to any element in a CATRig.
- Right-click the selected FootPlatform in the viewport and choose Curve Editor.
The Curve Editor opens showing the curve for the CATStepShape track.

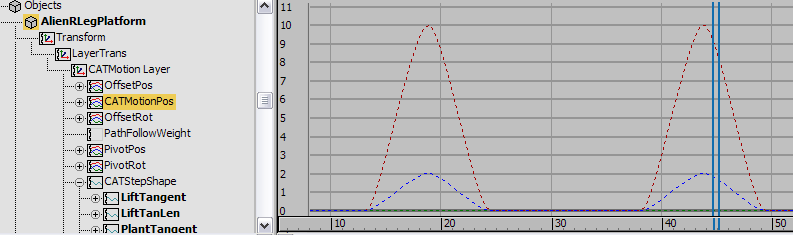
- Click the CATMotionPos track. The information for the selected element is held in this controller.
Here you can see the graph that represents the trajectory for the selected Footplatform, as compared to the CATMotion graph for the Footplatform controller (following).