Cluster detection is the function that detects the areas where an action places support entities
A cluster is an area formed by contiguous triangles that are deemed to require support by a set of parameters. Every area-based support action has its own cluster detection.
| Parameter | Description | Notes |
|---|---|---|
| Minimal, Maximal area |
The size of a detected cluster's area must be fully within the range specified here, or it is disregarded for the respective support action. |
|
| Critical angle |
Areas of down-facing triangles angled at least this much away from the horizontal, highlighted in red, must be, and at minimum are, supported. Adjust this to meet your machine's and material's requirements. |
0-90° |
| Noncritical angle |
Areas of down-facing triangles angled at least this much away from the horizontal, highlighted in yellow, may be supported if they border on enough critically or non-critically angled triangles. Adjust this to smoothen the support contour or to merge small clusters of critical angle. |
0-90° |
| Cluster type |
The Type classifies clusters by the angle between normals of triangle pairs along cluster borders that have a stretch of cluster border run between them. If more than 75 % of a cluster's border length lies within converging pairs, a cluster is considered concave. If more than 75 % of cluster border lies within diverging pairs, the cluster is considered convex. In-between, a cluster is considered neither.
Tip: To restrict supporting to those areas which are neither convex nor concave, support the convex and concave ones first and follow up with a catch-all while disallowing duplicate support.
|
All, Concave, Convex, Non-concave, Non-Convex |
| Duplicate support |
This option controls whether triangles of a cluster gets supported with the respective action even when a previous action in the script has already applied some supports there. For example, use overlapping supported areas to create stepped support density that is stronger where the downskin's angle is particularly shallow. 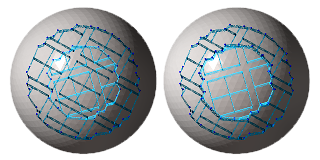 This sphere was supported with a script that included two actions with different values for cluster detection each. The smaller cluster was determined first (with a critical angle smaller than the larger cluster's). Left: Duplicate support tolerated. Right: Avoided.
Note: Technically, this compares the detected clusters first before actually generating any supports: If you have two support actions that both detect effectively the
same clusters, the second action (set to avoid duplicate clusters) does still
not generate any supports even when there would be space in the cluster to fit. For those cases, set this to tolerate duplicate support and also set
Keep distance to support to
Yes.
|
Avoid, Tolerate |
| Cluster inside or outside |
Clusters are considered inside when they belong to a fully enclosed cavity (a hollowing shell) with no connection to the outer skin. |
All, Inside, Outside |
| Keep distance to support |
When the clusters detected by separate support actions overlap each other, the supports generated by actions further down in the listing keep a distance to supports generated by earlier actions. Otherwise, they can generate overlapping supports similar to using duplicate support. |
|
| Distance to other support |
When distance to other supports is requested, this amount is kept as the distance. |
|
| Minimal, Maximal area above part |
A detected cluster's shadow area must only be intruded into by other mesh (same or different part) to a percentage specified by this range, or it is disregarded for the respective support action. |
|
| Minimal, Maximal z height |
All point in a detected cluster's area must lie within the z height range specified here, or the entire cluster is disregarded for the respective support action. |
|
| Respect face groups |
When a cluster is found to intersect with one or more face groups, every section thus created is handled as if it were a separate cluster.
Tip: To define face groups in
Netfabb, use
Texture & Color.
|
|
 Minimum jut width
Minimum jut width
|
A cluster jutting out from a wall (with a concave edge) must be wider at its farthest point than this threshold to receive support. |
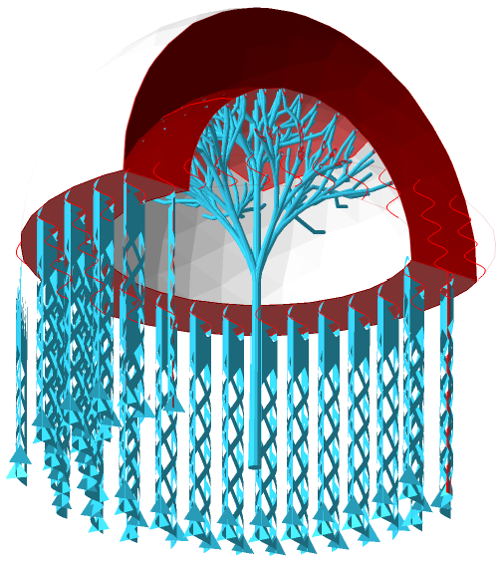
The top half of a hollow sphere, containing a concave and convex cluster. Each cluster is covered by a different action with its own detection settings each.