Any real structure will dissipate energy (mainly through friction). Thus damping is an important component of reality. Generally, damping would be ignored for non-transient events (such as wind loading, or crowd loading), but would be important for transient events (like an earthquake loading or bomb blast).
Various types of damping make up the damping matrix [B] in dynamic solutions. Therefore, the damping matrix consists of several matrixes:


where:
 = damping from damping elements (CVISC, CDAMPi) and B2GG DMIG
= damping from damping elements (CVISC, CDAMPi) and B2GG DMIG
 = damping from B2PP DMIG
= damping from B2PP DMIG
 = global stiffness matrix
= global stiffness matrix
 = global mass matrix
= global mass matrix
 = element stiffness matrix
= element stiffness matrix
 = overall structural damping coefficient (PARAM, G)
= overall structural damping coefficient (PARAM, G)
 = element structural damping coefficient (GE on the MATi entry)
= element structural damping coefficient (GE on the MATi entry)
 = frequency of interest in radians per unit time (PARAM, W3) for the conversion of overall structural damping into equivalent viscous damping
= frequency of interest in radians per unit time (PARAM, W3) for the conversion of overall structural damping into equivalent viscous damping
 = frequency of interest in radians per unit time (PARAM, W4) for the conversion of element structural damping into equivalent viscous damping
= frequency of interest in radians per unit time (PARAM, W4) for the conversion of element structural damping into equivalent viscous damping
 = Rayleigh damping stiffness matrix scale factor
= Rayleigh damping stiffness matrix scale factor
 = Rayleigh damping mass matrix scale factor
= Rayleigh damping mass matrix scale factor
The following table will show how some of the different damping terms affect the different solutions.
| Direct Frequency Response | Modal Frequency Response | Direct Transient Response | Modal Transient Response | |
| Damping Elements | Normal | Force Coupled Solution | Normal | Force Coupled Solution |
| Structural Damping | Normal | Normal | Converted to Equivalent Viscous | Converted to Equivalent Viscous - Force Coupled Solution |
| Modal Damping | Ignored | Normal | Ignored | Normal |
| Raleigh Damping | Force Coupled Solution | Force Coupled Solution | Normal | Normal |
If at all possible, it is in your best interest to use damping that corresponds to the Normal entries on the above table. Those combinations will yield the fastest runtimes.
Damping in Direct Frequency Response
In a direct frequency response problem, you are using a complex solution. As a result, the complex damping term can be used as is. It is not necessary to convert the structural damping to equivalent viscous damping. All forms of damping can be used without penalty.
Damping in Modal Frequency Response
In the modal solution, the damping matrix does not generally diagonalize. Further, any structural damping will create a complex stiffness matrix that does not diagonalize either. As a result, if either of those types of damping are included, the solution must be solved as in the direct method, but with modal coordinates. It is faster than solving in physical space, but not so fast as solving the uncoupled equations. In order to reap the benefits of the uncoupled solution, it is necessary to forgo the other kinds of damping and use only modal damping, which damps individual modal degrees of freedom individually.
Damping in Direct Transient Response
Transient response does not permit the use of complex coefficients. Therefore, structural damping is included by means of equivalent viscous damping.
The viscous damping force is a damping force that is a function of a damping coefficient b and the velocity. It is an induced force that is represented in the equation of motion using the [B] matrix and velocity vector.

where:
= global mass matrix
 = global damping matrix
= global damping matrix
= global stiffness matrix
 = global load vector
= global load vector
 = global acceleration vector
= global acceleration vector
 = global velocity vector
= global velocity vector
 = global displacement vector
= global displacement vector
The structural damping force is a displacement-dependent damping. The structural damping force is a function of a damping coefficient and a complex component of the structural stiffness matrix.

Assuming constant amplitude oscillatory response for a single degree of freedom system, the two damping forces are identical if:

or

Therefore, if structural damping is to be modeled using equivalent viscous damping b, then the equality holds at only one frequency (see image below).
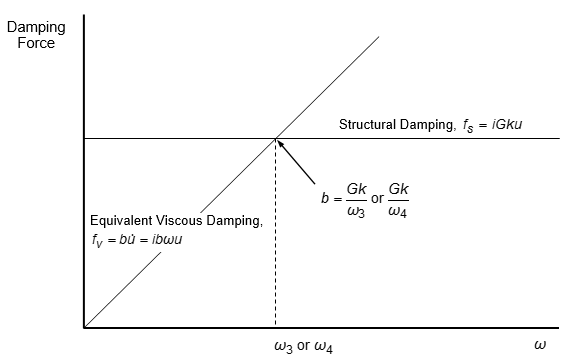
Two parameters are used to convert structural damping to equivalent viscous damping. An overall structural damping coefficient can be applied to the entire system stiffness matrix using PARAM, W3, r where r is the circular frequency at which damping is made equivalent. This parameter is used along with PARAM, G. The default for W3 is zero, which results in damping from this source to be ignored in transient analysis.
PARAM, W4 is an alternate parameter used to convert element structural damping to equivalent viscous damping. PARAM, W4, r is used, where r is the circular frequency at which damping is to be made equivalent. PARAM, W4 is used along with the GE field on the MATi entry. The default for W4 is zero, which results in damping from this source to be ignored in transient analysis.
Units for PARAM, W3 and PARAM, W4 are in radians per unit time. The choice of W3 or W4 is typically the dominant frequency at which damping is active. Often, the first natural frequency is selected, but isolated individual element damping can occur at different frequencies and can be handled by the appropriate data entries.
Damping in Modal Transient Response
Modal transient response analysis uses the mode shapes of the structure to reduce the size, uncouple the equations of motion, and make numerical integration more efficient.
To outline the procedure we first look at the general equation of equilibrium for a finite element system in motion:
The transformation from physical coordinates to modal coordinates  is given by:
is given by:
The mode shapes  are used to transform the problem in terms of the behavior of the modes as opposed to the behavior of the grid points.
are used to transform the problem in terms of the behavior of the modes as opposed to the behavior of the grid points.
If we assume modal damping is used, we can rewrite the general equation of equilibrium as:

which is now the equation of motion in terms of modal coordinates. To uncouple the equations, premultiply by  to obtain:
to obtain:

where:
 = modal or generalized mass matrix
= modal or generalized mass matrix
 = modal or generalized stiffness matrix
= modal or generalized stiffness matrix
 = modal damping matrix
= modal damping matrix
 = modal force vector
= modal force vector
Using the orthogonality property of the mode shapes we can formulate the equations of motion in terms of the diagonal generalized mass, stiffness, and damping (modal damping). Since these matrices do not have off-diagonal terms that couple the equations of motion, the modal equations of motion are uncoupled. The equations of motion can then be written as:

where:
 = i-th modal mass
= i-th modal mass
 = i-th modal damping
= i-th modal damping
 = i-th modal stiffness
= i-th modal stiffness
 = i-th modal force
= i-th modal force
 = i-th modal degree of freedom
= i-th modal degree of freedom
The above equation can also be written as:

where:
 = modal damping ratio
= modal damping ratio
 = modal frequency
= modal frequency
The physical responses are then recovered from the summation of the individual modal responses using:

|
Previous Topic: Transient Response Analysis |