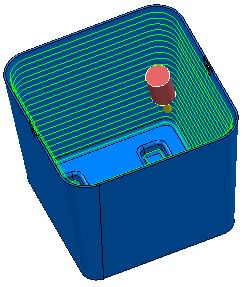
This is a slightly more complex example of the basic collision avoidance example. It uses a Constant Z toolpath on the bucket.dgk model in the Examples folder. The toolpath is limited to the inside of the bucket.

- Click Toolpath Edit tab > Edit panel > Tool Axis to display the
Tool Axis
dialog. On the
Definition
tab:
- select a Tool Axis of Vertical.
- select Automatic Collision Avoidance.
- On the
Collision Avoidance tab, set the following:
- Tilt Tool Axis — Lean
- Shank Clearance — 1.0
- Holder Clearance —- 3.0
- Create a constant Z toolpath, the tool starts off vertical.

Then a lean angle is applied so that the tool holder just clears the model.

As the toolpath proceeds down the model, the lean angle changes so that the tool holder just clears the model:
And so on down the model:
