La fonction nor calcule le vecteur normal de l'unité (vecteur perpendiculaire à une ligne ou à un plan), et non un point. Le vecteur définit la direction de la normale, et non un emplacement dans l'espace. Vous pouvez ajouter ce vecteur normal à un point pour obtenir un autre point.
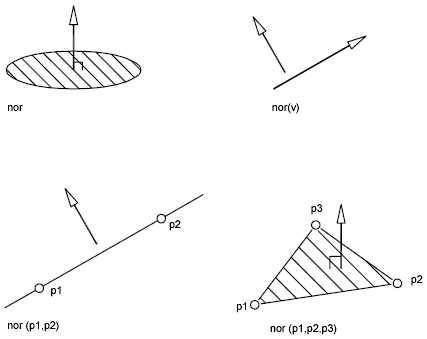
- nor
-
Détermine le vecteur 3D normal de l'unité d'un cercle, d'un arc ou d'un segment d'arc de polyligne sélectionné. Ce vecteur normal correspond à la coordonnée Z du système de coordonnées de l'objet (SCO) sélectionné.
- nor(v)
-
Détermine le vecteur 2D normal de l'unité par rapport au vecteur v. Les deux vecteurs sont considérés en 2D, projetés sur le plan XY du SCU courant. Le vecteur normal résultant est orienté vers la gauche du vecteur d'origine v.
- nor(p1,p2)
-
Détermine le vecteur 2D normal de l'unité par rapport à la ligne p1,p2. Cette ligne est orientée de p1 vers p2. Les points vectoriels normaux résultant sont orientés vers la gauche de la ligne d'origine (p1,p2). nor(p1,p2,p3)
- nor(p1,p2,p3)
-
Détermine le vecteur3D normal de l'unité par rapport à un plan défini par les trois points p1, p2et p3. L'orientation du vecteur normal est telle que les points définis vont dans le sens trigonométrique par rapport à la perpendiculaire.
Les illustrations suivantes montrent comment sont calculés les vecteurs perpendiculaires :
L'exemple ci-après définit le sens de visualisation perpendiculaire à un objet sélectionné. Le programme affiche l'objet dans une vue en plan et ne le déforme pas par la projection parallèle.
Commande: pointvue
Direction de la vue courante: VIEWDIR=courant
Indiquez un point de vue ou [rOtation] <afficher la boussole et la représentation des axes>: 'cal
>> Expression: nor
>> Sélectionnez le cercle, l'arc ou la polyligne pour la fonction NOR: