위치 표현은 조립품의 운동 "스냅샷"을 캡처하여 동작 연구 및 다양한 위치의 조립품 평가를 가능하게 해 줍니다. 위치 표현은 상위 조립품에 저장됩니다. 나중에 분석하거나 수정할 수 있도록 위치 표현을 언제든지 검색할 수 있습니다.
Positional Representations 폴더는 모형 및 표현 검색기에 있습니다. 금형 설계 검색기에서는 이 폴더를 사용할 수 없습니다.
조립품이 닫히지 않았고 마스터 위치 표현에 없는 경우에는 금형 환경에서 편집할 수 없습니다.
마스터 위치 표현이란 무엇입니까?
각 조립품은 조립품의 기본 상태를 나타내는 마스터 위치 표현을 가지고 있으며 이 표현에서 모델링 작업이 수행됩니다. 마스터 위치 표현은 편집할 수 없지만 모든 새 위치 표현이 마스터의 사본이기 때문에 필요하면 각 사본을 변경한 다음 마스터 위치 표현을 다시 활성화하여 조립품을 저장합니다. 금형 환경에서는 마스터 또는 닫힌 위치 표현에서 편집할 수 없습니다.
마스터 표현은 "유사 시 대기" 상태입니다. 다양한 상태의 조립품으로 여러 가지 위치 표현을 작성할 수 있습니다. 원래 조립품의 조립품 위치, 가시성, 구속조건 설정 및 기타 값에 대한 트랙을 잃게 될 수 있습니다. 작성한 위치 표현의 수에 상관없이 마스터 표현을 활성화하여 언제든지 조립품의 기본 상태로 돌아갈 수 있습니다.
위치 표현을 작성하고 편집하려면 어떻게 합니까?
새 금형 베이스를 삽입하면 기본 위치 표현이 작성됩니다. 위치 표현에 대한 자세한 내용은 다음 도움말 항목을 참고하십시오.
금형 응용프로그램에서 작성하는 기본 표현은 무엇입니까?
새 금형 베이스를 삽입하면 명명된 구속조건이 있는 시스템 정의 표현이 작성됩니다. 두 개의 판 금형 베이스에 대한 유효한 명명된 구속조건은 PL1 및 이젝션입니다. 세 개의 판 금형 베이스에 대한 유효한 명명된 구속조건은 PL1, PL2, PL3 및 이젝션입니다. 이러한 구속조건의 값은 시스템 정의 표현에서 수정할 수 있습니다.
새 금형 베이스 두 개를 삽입하면 다음 위치 표현이 작성됩니다.
- 마스터
- 제품 열기
- 이젝션
- 닫기
- 자유 끌기
새 금형 베이스 세 개를 삽입하면 다음 위치 표현이 작성됩니다.
- 마스터
- 러너 열기
- 스프루 열기
- 제품 열기
- 이젝션
- 닫기
- 자유 끌기
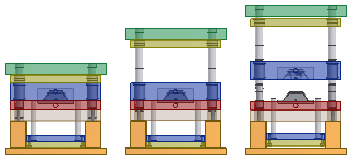
위치 표현에서 구속조건을 구동할 수 있습니까?
닫힌 표현을 활성화한 다음 모형 검색기의 상황에 맞는 메뉴에서 구속조건 구동을 사용합니다. 운동학 구속조건의 시작 및 중지 거리를 지정하여 기계 동작을 시뮬레이트합니다. 구속조건 구동 명령은 하나의 구속조건으로 제한되어 있지만 방정식을 사용하여 추가 구속조건을 연동하면 구속조건 사이에 대수 관계를 작성할 수 있습니다.
운동학 구속조건이란 무엇입니까?
두 개의 판 금형 베이스에는 다음 두 가지 운동학 구속조건이 포함되어 있습니다.
- PL1 RSP(러너 스트리퍼 판)과 AP(중공 판) 사이의 구속조건
- 이젝션 EP(이젝터 판)과 맨 아래 BCP(클램핑 판) 사이의 구속조건
세 개의 판 금형 베이스에는 다음 네 가지 운동학 구속조건이 포함되어 있습니다.
- PL1 코어 판(BP)과 AP(중공 판) 사이의 구속조건
- PL2 러너 스트리퍼 판(RSP)과 맨 위 클램핑 판(TCP) 사이의 구속조건
- PL3 코어 판(BP)과 AP(중공 판) 사이의 구속조건
- 이젝션 EP(이젝터 판)과 맨 아래 클램핑 판(BCP) 사이의 구속조건