첫 번째 풀리는 연동 풀리로 간주됩니다. 나머지 풀리는 연계 풀리 또는 아이들러입니다. 입력 동력은 각 풀리의 동력비 계수를 사용하여 여러 연계 풀리 사이에 분할할 수 있습니다. 이에 따라 힘과 토크가 계산됩니다.
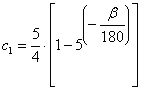
접촉 호 정정 계수 c 1
접촉 호 정정 계수는 접촉 호가 180도가 아닌 풀리에 대한 V-벨트 동력비를 정정합니다. 정정 계수의 크기는 다음 방정식에 따라 결정됩니다.
서비스 계수 c 2
서비스 계수는 일일 서비스 기간과 구동 단위 및 구동기의 유형과 관련이 있습니다. 서비스 계수는 전달할 동력을 정정합니다. 또한 시동 토크, 시동 진동수 또는 동하중이 높거나 가속도가 있는 구동에 대해서는 서비스 계수를 증가시켜야 합니다.
벨트 길이 정정 계수 c 3
벨트 길이 정정 계수는 길이가 기준 벨트 길이와 다른 벨트의 동력비와 관련이 있습니다. 이 값은 벨트 제조업체에서 정의하며 벨트 데이터 파일에 명시됩니다. 길이 정정 계수 값이 1.0인 경우 벨트 기준 길이는 아무런 영향을 받지 않습니다.
벨트 수 정정 계수 c 4
벨트 수 정정 계수는 두 개 이상의 V-벨트를 사용한 전동에서 발생할 수 있는 여러 벨트 간 하중 분포 차이를 고려합니다. 벨트당 하중의 차이는 벨트의 길이 차이 및 샤프트 변형에 따른 것입니다. 벨트 수 정정 계수는 다음과 같은 대략적인 값을 제공하는 내장된 테이블에 따라 V-벨트의 동력비를 정정합니다. 테이블에 나타나지 않은 값은 선형 보간을 사용하여 계산됩니다.
|
z |
1 |
3 |
6 |
999 |
|
c 4 |
1 |
0.95 |
0.9 |
0.85 |
풀리 수 정정 계수 c 5
이 계수는 벨트 동력비를 정정합니다. 이 계수는 추가 풀리 또는 아이들러로 인해 발생하는 추가 굽힘 응력을 고려합니다. 아이들러를 사용하면 벨트 성능에 영향을 주므로 벨트 동력비를 낮춰야 합니다.
일반적으로 아이들러는 고정 중심 거리의 구동을 위한 장력 제공, 코너 회전, 벨트 진동이 문제가 될 수 있는 긴 스팬 제동, 인장 유지, 클러치 장치 역할 등에 사용됩니다. 가능하면 아이들러를 사용하지 않는 것이 좋습니다. 그러나 구동에 필요한 경우에는 벨트 수명을 최소한으로 단축시키도록 아이들러의 치수와 위치를 설계합니다. 또한 아이들러 내부의 크기는 가장 작은 전동 풀리보다 커야 합니다.
아이들러 외부는 가장 작은 전동 풀리보다 50% 이상 더 커야 합니다.
풀리 수 정정 계수는 기본적으로 다음과 같은 내장된 테이블에 따라 결정됩니다. 테이블에 나타나지 않은 값은 선형 보간을 사용하여 계산됩니다.
|
k |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
100 |
|
c 5 |
1 |
0.91 |
0.86 |
0.81 |
0.78 |
0.76 |
0.75 |
0.7 |
인장 계수 k 1
인장 계수는 벨트의 초기 장착 장력을 제어합니다. 벨트 제조업체에서 제공하는 권장 지침이 있습니다. 이러한 권장 사항에 따라 벨트가 인장되지 않을 경우에는 벨트 동력비(마력)가 제대로 결정되지 않을 수 있습니다. 장착 장력은 효율, 벨트 슬립 및 서비스 수명에 많은 영향을 줍니다. 일반적으로 사용되는 벨트 인장 계수의 크기는 1.0에서 1.5 사이이며 이 범위가 사실상 확정된 기준입니다.
벨트 장력이 부족하면 충분한 동력이 전달되지 않으며 효율이 줄어들고 벨트 슬립으로 인해 벨트가 빨리 손상됩니다.
반면, 벨트 장력이 지나치게 크면 특정 표면 압력이 높고 교차 플렉스의 위험이 있으며 플렉스 응력과 인장 부재의 변형이 증가하여 찢어지거나 늘어나게 됩니다.
벨트 장력은 정상적인 하중 조건에서 벨트 슬립이 발생하지 않을 정도가 적당합니다.
효율성 토크 계수 η t
효율성 토크 계수는 벨트 전동의 품질 수준을 나타내며 출력 토크를 감소시키는 에너지 손실을 고려합니다. 벨트의 변형 에너지와 같은 계수, 그루브 내 감김의 교란 현상 등이 발생합니다. 벨트 슬립으로 인한 동력 손실은 여기에 포함되지 않으며 생성기에 따라 개별적으로 결정됩니다. 이러한 두 가지 계수의 조합을 통해 최종 벨트 연동 효율성이 결정됩니다.
벨트 슬립 및 전체 벨트 연동 효율 η
벨트 연동 계수는 가장 의심되는 풀리에서 다음과 같이 결정됩니다.
![]()
벨트 슬립은 내장된 슬립 테이블에 따라 정의됩니다.
연계 풀리 속도
![]()
연계 풀리 출력 동력
P i = P xi F p v η t (1 - s)
![]()
내장된 슬립 테이블
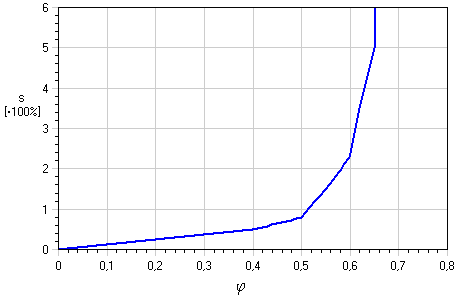
다음과 같이 간주됩니다.
- 벨트 슬립은 연동 풀리에서 발생하므로 모든 연계 풀리 및 아이들러의 속도가 해당 슬립의 영향을 받습니다.
- 슬립으로 인한 벨트 속도 변화는 무시합니다. 일반적인 벨트 슬립 크기는 1 - 2%(즉, s = 0,01 - 0,02)입니다.
전동비
V-벨트 생성기의 전동비는 각 연계 풀리 및 아이들러에 대해 결정됩니다. 각각 고유한 의미를 가지는 세 가지 유형의 전동비가 있습니다.
|
i D |
[-] |
주어진 풀리에 대해 원하는 전동비(속도비). 이 비율은 풀리 크기에 대한 설계 안내서로 사용됩니다. 이 비율을 설정할 경우 V-벨트 생성기는 원하는 전동비를 만족하는 가장 가까운 풀리 지름을 찾습니다. |
|
i T |
[-] |
주어진 풀리에 이상적인 전동비(속도비). 이 비율은 풀리 지름에서 직접 정확한 값으로 계산됩니다. 벨트 슬립은 고려되지 않습니다. |
|
i |
[-] |
주어진 풀리의 전동비(속도비). 이 비율은 벨트 슬립을 고려하여 계산됩니다. 이 값을 전체 하중에서 풀리에 대한 가장 근접한 전동비로 사용하십시오. 주어진 풀리의 동력 및 샤프트 속도는 이 비율에 따라 결정됩니다. |
벨트 속도에 따라 마찰 수정 f mod
벨트 속도에 따라 마찰 수정 계수는 벨트 속도에 따라 마찰계수가 변경되는 정도를 나타냅니다. 마찰 수정 계수가 0이면 마찰계수에 영향을 주지 않습니다.
결과 서비스 계수 c PR
결과 서비스 계수는 아래 방정식으로 결정됩니다. 주어진 전동 배치에 대한 벨트 동력비는 전달할 동력과 비교됩니다. 결과 서비스 계수를 통해 벨트 연동이 과도하게 설계된 정도를 쉽게 확인할 수 있습니다.
![]()
|
c PR < c 2 |
강도 검사 실패 |
|
c PR ≥ c 2 |
강도 검사 성공 |
|
c PR > c 2 |
전동 배치를 변경하려면 다른 벨트를 사용하거나 벨트 폭을 줄입니다. |
사용된 변수의 의미
|
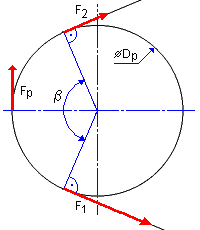
β |
접촉 호 [도] |
|
F p |
유효 인장(또는 유효 장력) [N] |
|
n 1 |
연동 풀리의 속도 [rpm] |
|
n i |
주어진 연계 풀리의 속도 [rpm] |
|
i |
주어진 풀리의 전동비(속도비) [-] |
|
s |
벨트 슬립 [-] |
|
P x |
주어진 풀리의 동력비 [-] |
|
P R |
벨트 동력비, 하나의 벨트에서 전달할 수 있는 동력 [W] |
|
v |
벨트 속도 [m/s] |
|
η t |
효율성 토크 계수 [-] |
|
P |
전달할 동력 [W] |
|
z |
벨트 수 [-] |