|
|
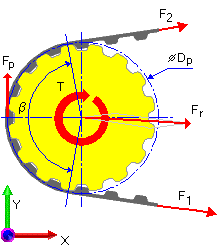
각 풀리의 경우 |
|
F 2 - F 1 + F p = 0 |
|
|
|
|
|
|
|
|
|
연동 풀리의 경우
![]()
|
|
v ≤ v max |
|
|
f b ≤ f max |
![]()
F c = mv 2
F Tmax = k 1 F p + F c
F 1 = F tmax
F 2 = F 1 - F p
개별 연계 풀리 및 아이들러의 경우
풀리의 i 지수
F Pi = P xi F p
![]()
![]()
![]()
F 1i = F 2i-1
F 2i = F 1i + F p i
여기에서
동기식 풀리의 경우 ![]()
플랫 풀리의 경우 ![]()
전체 벨트 연동의 경우
![]()
필요한 벨트 장착 장력은 다음과 같이 연동 풀리의 힘에 따라 결정됩니다.
![]()
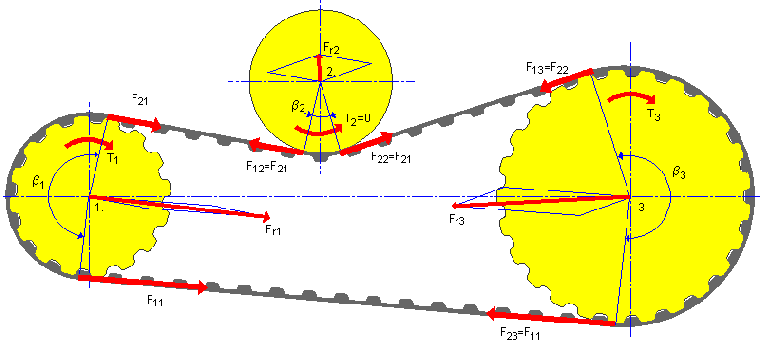
아이들러를 사용한 전동의 예
|
연동 풀리 |
플랫 아이들러 |
연계 풀리 |
|
P x1 = 1 |
P x2 = 0 |
P x3 = 1 |
|
|
|
F P3 = P x3 F p |
|
|
|
|
|
|
|
|
|
|
F 12 = F 21 |
|
|
|
F 22 = F 12 + F p2 = F 12 |
|
|
F c = m v 2 |
|
|
|
F Tmax = k 1 F p + F C |
- |
F 13 = F 22 |
|
F 11 = F Tmax |
- |
F 23 = F 13 + F p3 = F 11 |
|
F 21 = F 11 - F p |
- |
|
|
|
- |
- |
사용된 변수의 의미:
|
F p |
유효 인장 [N] |
|
F 1 |
주어진 풀리의 입력 면 벨트 장력 [N] |
|
F 2 |
주어진 풀리의 출력 면 벨트 장력 [N] |
|
z |
주어진 풀리의 톱니 수/벨트 톱니 수 [-] |
| β |
접촉 호/톱니면 경사 각도 [도] |
|
P |
전달할 동력 [W] |
|
P R |
주어진 전동 배치에 대한 벨트 동력비 [W] |
|
c L |
서비스 계수 [-] |
| β |
접촉 호 [도] |
|
T |
주어진 풀리에 작용하는 토크 [Nm] |
|
n |
주어진 풀리의 속도 [rpm] |
|
D p |
피치 풀리 지름 [m] |
|
v |
벨트 속도 [m/s] |
|
k |
벨트 전동 내 풀리 수 [-] |
|
L |
벨트 피치 길이 [m] |
|
P |
전달할 동력 [W] |
|
m |
주어진 폭에 대한 고유 벨트 가중치 [Kg/m] |
|
k 1 |
벨트 인장 계수 [-] |
|
F p |
유효 인장 [N] |
|
F c |
원심력 [N] |
|
F t |
최소 벨트 장착 장력 [N] |
|
P xi |
주어진 풀리의 동력비 [-] |
|
D pi |
피치 풀리 지름 [m] |
|
i |
주어진 풀리의 전동비(속도비) [-] |
|
T i |
주어진 풀리에 작용하는 토크 [Nm] |
| η |
효율 [-] |
|
p b |
원형 피치 [m] |
|
D |
공칭 플랫 풀리 지름 [m] |
|
H |
벨트 높이 [m] |
|
h T |
벨트 톱니 높이 [m] |
|
a |
피치 선 간격띄우기 [m] |