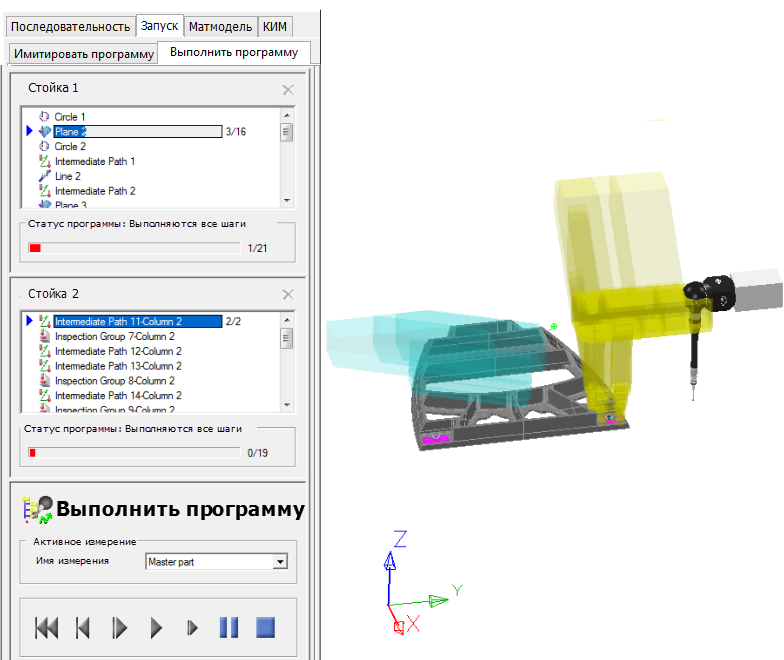
В двухстоечном режиме объекты, связанные с каждой стойкой, отображаются в отдельных частях вкладки Запустить программу. Это позволяет контролировать, какие запущены стойки, просматривать прогресс измерения на каждой стойке, когда они запущены одновременно, а также задавать отдельные диапазоны для каждого набора стоек. По умолчанию вид матмодели также показывает прогнозируемые перемещения каждой стойки, поэтому вы можете проверить их относительное расположение для исключения потенциальных столкновений.
Выполнение последовательности измерения
- Выберите вкладку Запуск, а затем вкладку Имитировать программу. В списке Машина выберите имитатор, который хотите отобразить на виде матмодели.
- Выберите вкладку Выполнить программу. Вкладка показывает объекты измерения, назначенные для каждого имитатора, а также диалоговое окно Выполнить программу.
- Для работы только с одной стойкой нажмите кнопку Включить/выключить стойку
 для стойки, которая использоваться не будет.
для стойки, которая использоваться не будет.
- Используйте кнопки в диалоговом окне Выполнить программу для выполнения последовательность измерения. Например, чтобы проверить все объекты, нажмите
 .
.
Во вкладке Выполнить программу отображается прогресс выполнения измерения для каждой стойки в процессе измерения последовательности, а на виде матмодели отображаются перемещения выбранной стойки, а также область прогнозируемых перемещений для каждой стойки. Например:
- Если прогнозируемые зоны накладываются друг на друга, появляется сообщение, предупреждающее о том, что щупы могут столкнуться, и измерение останавливается. Убедитесь, что траектории не приводят к столкновениям перед повторным запуском измерения. Если проблема повторяется, настройте чувствительность настроек прогнозирования в диалоговом окне «Конфигурация прогнозирования столкновений».
Когда вы проверите измерение при рабочих скоростях, можно отключить прогнозирование столкновений, отменив выбор параметра «Выполнять прогнозирование столкновений» в диалоговом окне «Конфигурация прогнозирования столкновений».