Autodesk Civil 3D 可以根据竖曲线、变坡点信息以及对象和视线高度的几何定义计算值。
这些值源自经验方程式并且不使用设计速度。
对于凸曲线,由于曲线峰点会妨碍驾驶员对道路曲面或其他对象的观察,因此使用超车视距和停车视距。
对于凹曲线,由于没有曲线峰点妨碍驾驶员对道路曲面或其他对象的观察,因此不使用超车视距和停车视距。在能见度良好的白天,驾驶员在凹曲线上可以完全看清道路。但是在晚上,驾驶员只能看到前灯光束范围内的距离。要设计凹曲线,可以使用前灯视距。
您可以使用“文本组件编辑器”在 Autodesk Civil 3D 2023 中显示这些特性。在“工具空间”的“设定”选项卡上,展开“纵断面” “标签样式”“曲线”。双击默认的凸形和凹形标签样式。单击“布局”选项卡。在“组件名称”下选择项目,如 BVC。在“文本组件编辑器”中,单击“特性”下面的下拉箭头以显示可用特性列表。向下滚动以查看诸如前灯视距、超车视距等特性。
“标签样式”“曲线”。双击默认的凸形和凹形标签样式。单击“布局”选项卡。在“组件名称”下选择项目,如 BVC。在“文本组件编辑器”中,单击“特性”下面的下拉箭头以显示可用特性列表。向下滚动以查看诸如前灯视距、超车视距等特性。
根据超车视距和停车视距创建凸曲线
超车视距是驾驶员用于看清迎面而来的车辆,从而确定是否有足够的距离可以留出一个超车车道的必需距离。超车视距在凸曲线设计中并不常用,因为满足超车视距标准所需的曲线长度通常是禁止的。
停车视距是一个在确定曲线长度时广泛运用的标准,即驾驶员看到道路曲面上的危险所必需的距离。政府的指导性文件规定要求的超车视距和停车视距。
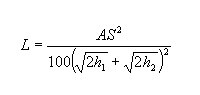
下列方程式使用超车视距和停车视距计算凸曲线长度。
其中:
L = 竖曲线的长度(以英尺或米为单位)
S = 视距(以英尺或米为单位)
A = 坡率百分比的代数差 (%)
h1 = 观察者的视线高于道路曲面的高度(以英尺或米为单位)
h2 = 对象高于道路曲面的高度(以英尺或米为单位)
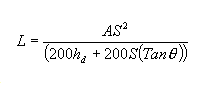
当 S 小于 L 时,下列方程式对 L 求解:
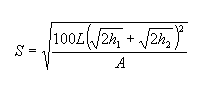
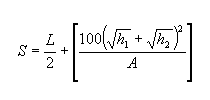
当 S 小于 L 时,下列方程式对 S 求解:
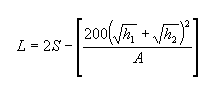
当 S 大于或等于 L 时,下列方程式对 L 求解:
当 S 大于或等于 L 时,下列方程式对 S 求解:
根据前灯视距创建凹曲线
在晚上,车辆的前灯光束可定义视距。凹曲线会截断前灯在道路曲面上的光束,从而限制光束长度。前灯视距测量前灯光束高出铺装层的最高值以及最大前灯角度来确定曲线长度。还要考虑驾驶员的视线高度。
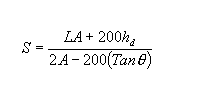
下列前灯视距方程式用于创建凹曲线。
其中:
A = 坡率百分比的代数差 (%)
hd = 前灯光束高出铺装层的高度(以英尺或米为单位)
L = 竖曲线的长度(以英尺或米为单位)
S = 视距(以英尺或米为单位)
Ø = 前灯光束从水平向上斜的角度(通常为 1 度)
当 S 小于 L 时,下列方程式对 L 求解:
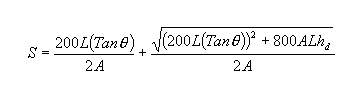
当 S 小于 L 时,下列方程式对 S 求解:
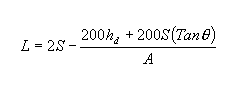
当 S 大于或等于 L 时,下列方程式对 L 求解:
当 S 大于或等于 L 时,下列方程式对 S 求解: