Bewegte Festkörper
Das Konzept des Modellierens von bewegten Festkörpern ist einfach. Es wird davon ausgegangen, dass das Fluid, das mit einem Festkörper in Kontakt kommt, am Kontaktpunkt die momentane Geschwindigkeit annimmt. In anderen Worten: In dieser Situation wird eine schlupffreie Randbedingung angewendet.
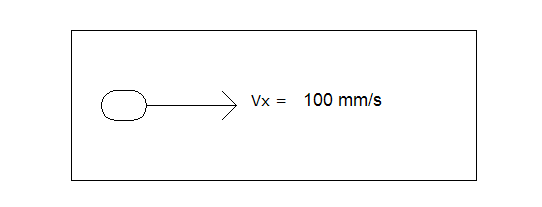
Beispiel: In folgender Skizze bewegt sich ein Projektil mit 100 mm pro Sekunde von links nach rechts. Dies bedeutet, dass dem Fluid entlang der Fläche des Festkörpers bei jedem Zeitschritt eine Geschwindigkeit von 100 mm/s zugewiesen wird.
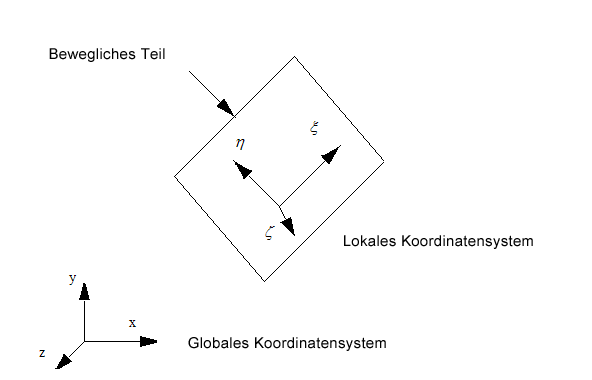
Um beliebige Bewegungen zu ermöglichen, wird in jedem bewegten Teil ein lokales Koordinatensystem platziert. Es wird davon ausgegangen, dass sich das Teil in Bezug auf dieses lokale Koordinatensystem nicht bewegt. Anstelle dessen bewegt sich das lokale Koordinatensystem im Vergleich zum globalen Koordinatensystem.
Die globalen Koordinaten eines Punkts (x, y, z) auf dem bewegten Teil können mit folgender Transformation berechnet werden.
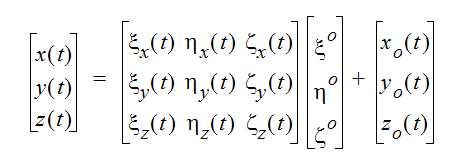
wobei (x, y, z) die globalen Koordinaten sind, die zu einer beliebigen Zeit (t) berechnet werden.
 sind die Koordinaten des bewegten Teils im lokalen Koordinatensystem. Sie werden durch ein hochgestelltes "o" gekennzeichnet, um anzugeben, dass sie nur einmal zum Zeitpunkt Null berechnet werden. Definitionsgemäß sind sie zeitinvariant.
sind die Koordinaten des bewegten Teils im lokalen Koordinatensystem. Sie werden durch ein hochgestelltes "o" gekennzeichnet, um anzugeben, dass sie nur einmal zum Zeitpunkt Null berechnet werden. Definitionsgemäß sind sie zeitinvariant. sind die Komponenten der lokalen x-Achse.
sind die Komponenten der lokalen x-Achse. sind die Komponenten der lokalen y-Achse.
sind die Komponenten der lokalen y-Achse. sind die Komponenten der lokalen z-Achse.
sind die Komponenten der lokalen z-Achse. ist die globale Position des Ursprungs des lokalen Koordinatensystems.
ist die globale Position des Ursprungs des lokalen Koordinatensystems.
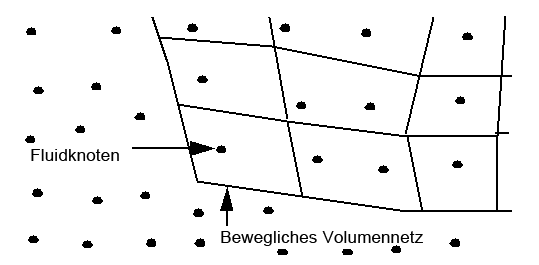
Anstatt in jeder Zeitebene ein neues Netz zu machen, wird es dem Festkörpernetz gestattet, direkt durch das Fluidnetz durchzukommen. Wenn ein Fluidknoten durch ein Festkörperelement "maskiert" wird, wird die Geschwindigkeit des nächsten Festkörperknotens auf diesen maskierten Fluidknoten angewandt. In diesem Diagramm wird der mit dem Pfeil markierte Fluidknoten durch das Festkörperelement an der Ecke des bewegten Teils maskiert. Alle Fluidknoten innerhalb der Grenzen des bewegten Teils werden als "maskiert" betrachtet, weshalb ihre Geschwindigkeiten vom bewegten Festkörper gesteuert werden.
Wenn Modelle ursprünglich konstruiert werden, werden diese bewegten Festkörper häufig im Fluid eingebettet. Wenn sich der Festkörper zu bewegen beginnt, ist ein Fluid erforderlich, das den Bereich ausfüllt, den der Festkörper leer lässt. Um dieser Situation zu begegnen, werden allen Festkörpern, die so konstruiert sind, dass sie in Kontakt mit dem Fluid sind, Fluidelemente und -knoten automatisch hinzugefügt. Diese Aktion wird Replikation genannt. Wenn die Modelle so konstruiert werden, dass sich die bewegten Festkörper außerhalb des Fluidbereichs befinden, wird keine Replikation durchgeführt.
Lineare Bewegung
Die lineare Bewegung wird entlang einer gegebenen Richtung wie in folgender Abbildung beschrieben.
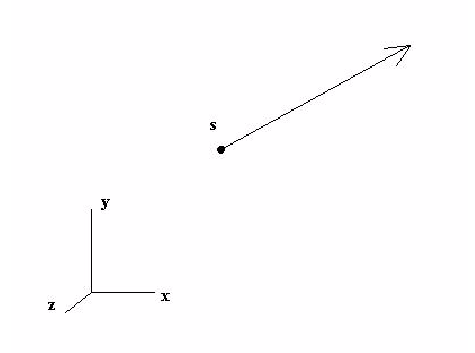
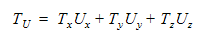
Die Verschiebung (angegeben als s) wird relativ zur Anfangsposition des Objekts gemessen. Das Benutzer kann "s" als Funktion der Zeit definieren, um das Objekt entlang der Bewegungsbahn zu bewegen. Die Bewegungsbahn wird mithilfe eines Richtungseinheitsvektors (Ux, Uy, Uz) definiert. Die Bewegung ist im globalen Koordinatensystem wie folgt definiert:

Wenn die lineare Bewegung strömungsbedingt ist, dann werden die im globalen Referenzrahmen berechneten Scher- und Druckkräfte in der "s"-Richtung mithilfe eines Punktprodukts angewendet:
Zu dieser Kraft können Zwangskräfte und eine Federkraft hinzugefügt werden. Die Gleichungen der Bewegung lauten:
wobei a die Beschleunigung ist, M die Masse, v die Geschwindigkeit, s die Verschiebung und t die Zeit.
Drehbewegung
Bei der Drehbewegung ist es ein Objekt, das um eine Achse gemäß folgender Abbildung rotiert.
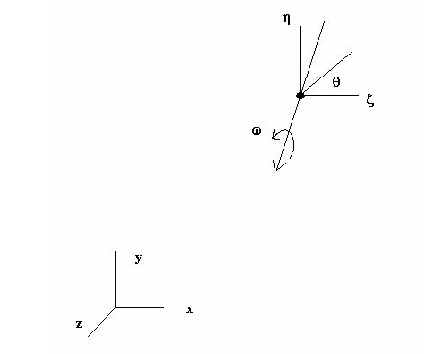
Die Achse, um die sich das Objekt dreht, wird mithilfe eines Einheitsvektors definiert (Ux, Uy, Uz). Der Drehmittelpunk wird an einem Punkt (Px, Py, Pz) angegeben. Die Winkelmessung erfolgt über die Variable  .
.
Gemessen wird relativ zur Ausgangsposition des bewegten Objekts. Im lokalen Koordinatensystem kann die Bewegung mit im Verhältnis zur Zeit beschrieben werden.
Für eine dreidimensionale Darstellung ist es hilfreich, die Bewegung mithilfe von Richtungskosinussen darzustellen:
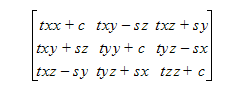
wobei:

Wenn die Bewegung strömungsbedingt ist, wird das auf die auf die Rotationsachse wirkende Drehmoment über ein Punktprodukt berechnet:
Das vom Benutzer vorgegebene Drehmoment kann zu diesem Drehmoment hinzugefügt werden. Die Gleichungen der Bewegung lauten:
wobei  die Winkelbeschleunigung, Iu die Rotationsträgheit auf dem Rotationsvektor,
die Winkelbeschleunigung, Iu die Rotationsträgheit auf dem Rotationsvektor,  die Winkelgeschwindigkeit und die Winkelposition ist und t für die Zeit steht.
die Winkelgeschwindigkeit und die Winkelposition ist und t für die Zeit steht.
Kombination aus linearer und Drehbewegung
Wenn die Ergebnisse der beiden obigen Abschnitte kombiniert werden, kann eine kombinierte Bewegung beschrieben werden. Der Mittelpunkt der Drehung wird entlang der durch "s" vorgegebenen Bahn verschoben. Die Drehung wird wieder lokal beschrieben und Richtungskosinusse global. Wenn die lineare Verschiebung strömungsbedingt ist, entwickeln die Fluidkräfte einen Kraftvektor entlang der Bewegungsrichtung, wodurch sich eine lineare Beschleunigung ergibt.
Für strömungsbedingte Drehungen werden die entwickelten Drehmomente für die Berechnung von Winkelbeschleunigungen verwendet. Wenn beide Bewegungen strömungsbedingt sind, wird davon ausgegangen, dass die beiden Bewegungen nicht gekoppelt sind und unabhängig wirken, um die Gesamtbewegung zu erzeugen. Die linearen Verschiebungsgleichungen aktualisieren den Mittelpunkt der Drehung mit der Zeit und die Rotationsgleichungen aktualisieren die Richtungskosinusse mit der Zeit, wodurch sich eine kombinierte Bewegung ergibt.
Umkreisungs- und Drehbewegung
Die Umkreisungsbewegung betrifft ein Objekt, das sich mit der Zeit auf einer Kreisbahn bewegt. Dies wird in der folgenden Abbildung gezeigt.
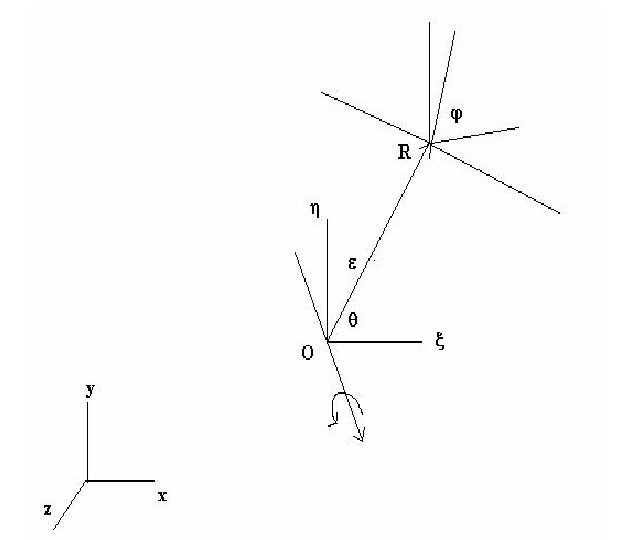
Die Variable  ist der Radius oder die Exzentrizität des Orbits. Sie wird mithilfe des Punkts O und des Punkts R berechnet:
ist der Radius oder die Exzentrizität des Orbits. Sie wird mithilfe des Punkts O und des Punkts R berechnet:
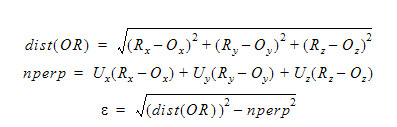
Hier wurde der nicht lotrechte Vektor subtrahiert, um die lotrechte Distanz zwischen dem Ursprung des Umkreisungssystems und der Achse des Drehsystems zu erhalten. Der Vektor (Ux, Uy, Uz) ist ein Einheitsvektor, der die Drehachse für das Umkreisungssystem beschreibt.
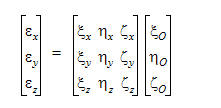
In einem lokalen Koordinatensystem ist der Orbit durch Folgendes gegeben:

Dies kann im globalen Referenzrahmen durch Konstruieren einer rotierenden Transformationsmatrix wie folgt ausgedrückt werden:
- Die lokale z-Achse (
 ) wird mit der Umkreisungsachse U gleichgesetzt.
) wird mit der Umkreisungsachse U gleichgesetzt. - Die lokale x-Achse (
 ) wird als Einheitsvektor vom Ursprung des Umkreisungssystems zum Ursprung des Rotationssystems bei Zeit = 0 konstruiert.
) wird als Einheitsvektor vom Ursprung des Umkreisungssystems zum Ursprung des Rotationssystems bei Zeit = 0 konstruiert. - Die lokale y-Achse (
 ) wird durch Kreuzung der lokalen z-Achse mit der lokalen x-Achse konstruiert.
) wird durch Kreuzung der lokalen z-Achse mit der lokalen x-Achse konstruiert. - Wenn alle lokalen Achsen definiert sind, wird ein Gram-Schmidt-Verfahren verwendet, um zu gewährleisten, dass das lokale System wirklich orthogonal ist.
Die globale Umkreisungsposition kann als Funktion von wie folgt geschrieben werden:
Wenn die Umkreisungsbewegung strömungsbedingt ist, werden die auf das bewegte Objekt wirkenden Kräfte addiert und die entsprechenden Beschleunigungen berechnet. Geschwindigkeiten und Verschiebungen sind auf die kreisförmige Umkreisungsbahn mit folgenden Beziehungen beschränkt:

Die Umkreisungsgleichungen der Bewegung definieren die Translation des bewegten Objekts. Ein Objekt kann sich außerdem an dem Punkt drehen, auf den der Exzentrizitätsvektor weist. Die Drehungsgleichungen, die oben entwickelt wurden, steuern diese Bewegung.
Taumelbewegung
Eine Taumelbewegung kann mit folgender Abbildung beschrieben werden.
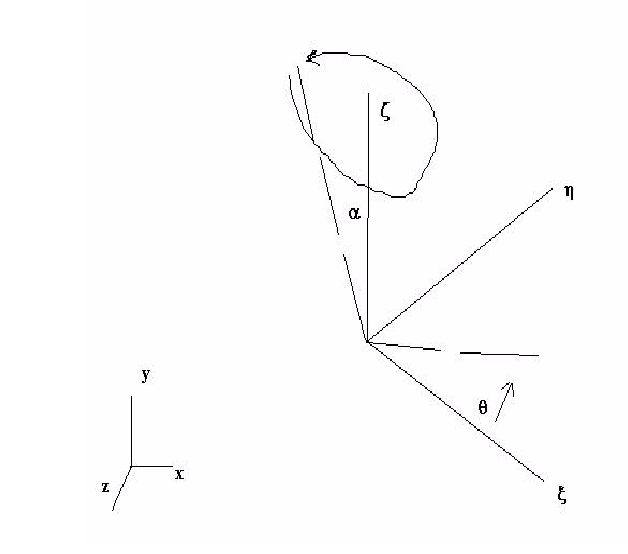
Die Präzession oder der Taumelwinkel wird als definiert. Der Winkel definiert die Winkelbahn um die lokale z-Achse. Die lokale y-Achse definiert eine Position, an der ein Stopp die Bewegung in den lokalen y- und z-Ebenen zulässt (d. h. = 0). Im lokalen Raum sind die Richtungskosinusse:
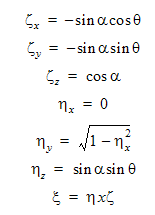
Wie zuvor wird eine Drehtransformationsmatrix verwendet, um die Richtungskosinusse im globalen Raum zu erstellen.
Wenn die Taumelbewegung strömungsbedingt ist, wird das Netto-Drehmoment verwendet, um die Winkelbeschleunigungen auf die gleiche Weise zu berechnen wie beim oben behandelten sich drehenden Körper.
Freie Bewegung
Diese Art der Bewegung verwendet die uneingeschränkte Formulierung für die Dynamik steifer Körper, die hier beschrieben ist.