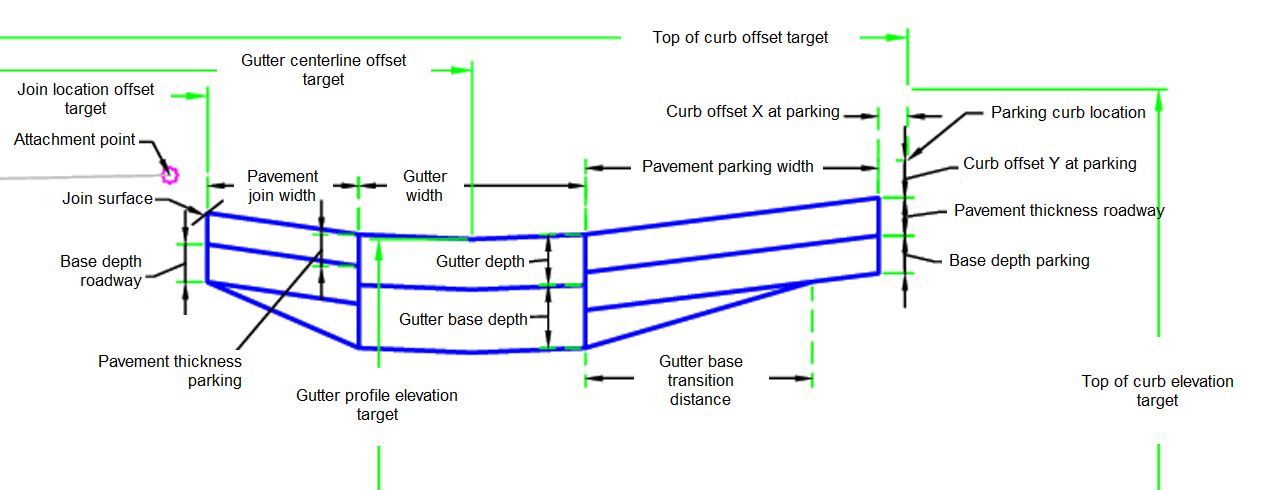
The ParkingAdjacentToRoad subassembly builds a parking area adjacent to an existing carriageway. The parking includes a paved area of the existing carriageway, a channel and a parking pavement. The parking pavement ties into a proposed kerb level and top of kerb location.
Attachment
The attachment point is at a point at the centre of the carriageway. This component can be attached to either the left or right side.
Input Parameters
|
Parameter |
Description |
Type |
Default |
|---|---|---|---|
| Side | Specifies which side to place the subassembly. | Left / Right | Right |
| Channel Width | Entire width of the channel | Numeric, positive |
3 ft 1 m |
| Channel Depth | Channel depth | Numeric, positive |
8 in 200 mm |
| Pavement Thickness Parking | AC pavement thickness | Numeric, positive |
2 in 50 mm |
| Channel Base Transition Distance | Transition of thicker base at channel | Numeric, positive |
3 ft 1 m |
| Kerb Offset Y At Parking | Kerb offset Y at back of parking | Numeric |
-0.5 ft -0.150 m |
| Kerb Offset X At Parking | Kerb offset X at back of parking | Numeric |
-0.625 ft -0.19 m |
| Pavement Parking Width | Pavement parking width | Numeric, positive |
20.5 ft 6.25 m |
| Channel Base Depth | Pavement join width | Numeric, positive |
2 ft 0.6 m |
| Base Depth Parking | Base depth under channel | Numeric, positive |
6 in 150 mm |
| Base Depth Carriageway | Base depth carriageway | Numeric, positive |
10 in 250 mm |
| Pavement Thickness Carriageway | Pavement thickness carriageway | Numeric, positive |
3 in 80 mm |
Target Parameters
This section lists the parameters in this subassembly that can be mapped to one or more target objects. For more information, see To Specify Corridor Targets.
|
Parameter |
Description |
Status |
|---|---|---|
| Join Location | Used to determine the join width from the attachment point. The following object types can be used as targets for specifying the width: alignments, polylines, feature lines or survey figures. | Required |
| Join Surface | Used to determine the join level. The following object types can be used as targets for specifying the surface: surfaces. | Required |
| Top of Kerb Offset | Used to determine the top of kerb level of the tie-in location of parking kerb. The following object types can be used as targets for specifying the level: profiles, 3D polylines, feature lines, or survey figures. | Required |
| Top of Kerb Profile | Used to determine the offset location for kerb and channel. The following object types can be used as targets for specifying the level: profiles, 3D polylines, feature lines, or survey figures. | Required |
| Channel Centreline | Used to determine the channel centreline location. The following object types can be used as targets for specifying the width: alignments, polylines, feature lines or survey figures. | Required |
| Channel Profile | Used to determine the centreline level of the channel. The following object types can be used as targets for specifying the level: profiles, 3D polylines, feature lines or survey figures. | Required |
Runtime Logical Assignments
None.
Output Parameters
|
Parameter |
Description |
Type |
|---|---|---|
| Lane Slope | Lane slope | Numeric |
Behavior
The initial reference point is set at the attachment point. The top of kerb profile and offset values are found to determine the location of the outer edge of the parking pavement. The join location is determined from the join location target. The join level is found based on the join location and the join surface target at this point. The channel location and channel level are determined from the set targets. The channel geometry is then built based on the input parameters. The pavement join geometry is built from the target join levels and input parameters. Then the parking pavement is built using the target values and input parameters.
Layout Mode Operation
In layout mode, this subassembly displays all links using the width and depth input parameters and assumed target values.
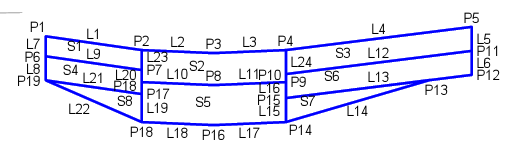
Point, Link and Shape Codes
The following table lists the point, link and shape codes for this subassembly that have codes assigned to them. Point, link or shape codes for this subassembly that do not have codes assigned are not included in this table.
|
Point, Link or Shape |
Code |
Description |
|---|---|---|
| P1 | Join | Pavement join location |
| P2 | Gutter_Edge | Channel edge |
| P3 | FL | Flowline of channel |
| P4 | EC | Edge of travelled way |
| P5 | FS | Finish surface |
| P12, P15, P17, P19 | Base | Base |
| L1, L4 | Top, Pave | Top of pavement |
| L2, L3 | Top, Channel | Top of channel |
| L9, L12 | Pavement | Bottom of pavement thickness |
| L10, L11 | Channel | Bottom of channel |
| L13, L14, L17, L18, L21, L22 | Datum | |
| S1, S3 | Pave | |
| S2, | Channel | |
| S4-S6, S7, S8 | Base |
Coding Diagram