Defining Flow-Driven Angular Motion
The angular motion of flow-driven objects is influenced by the flow as well as user-specified driving and resistive torques.
The origins of such torques do not have to be included in the analysis model--they act on the object in a user-prescribed manner to either accelerate the rotation of the object or to slow it down.
In several places in this topic, the direction of rotation of the object is referenced. This is the rotational direction specified as part of the axis of rotation on the Motion task dialog. Because the true rotational direction of flow-driven motion is not always known prior to the analysis, this direction is really the reference positive direction.
Flow-driven objects may start off rotating at a known velocity, and either speed up or slow down based on their interaction with the surrounding fluid (and applied forces).
To open the Motion Editor:
- On the Motion quick edit dialog, set the Type to Angular, and check Flow-Driven.
- Click Edit on the Edit Motion line.
To Define Flow-Driven Angular Motion:
- Three properties are available for specification, but entries are not required for all three: Initial Angular Velocity, Driving Torque, and Resistive Torque.
- For each property, select the Variation Method, and enter the appropriate values. The Variation Methods are described below for each property.
- Click the Apply button.
- Click OK when all information is entered to close the dialog.
Variation Methods
Initial Angular Velocity
If the object is rotating at the beginning of the calculation (and not starting from a dead-stop), the initial velocity can be specified.
The object will rotate at this velocity at the on-set of the calculation, and will react to the flow forces appropriately.
Driving Torque
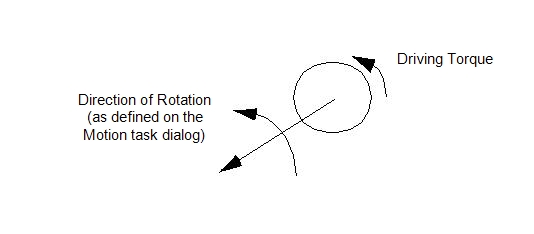
A driving torque is positive when applied in the reference direction of motion (as specified on the Motion task dialog). A negative driving torque will act in the opposite direction.
Examples of driving torque include electromagnetic and other body torque as well as torque imposed by objects omitted from the analysis geometry. The torque will act in the same direction as the direction of motion (as specified on the Motion task dialog).
A driving torque can be used to represent the force of gravity on an object if gravity is acting in the direction of travel. Specify a driving torque that is the product of the weight of the object and the length of the moment arm connecting the centroid to the center of rotation.
The variation methods for Driving Torque are described:
Constant:
Enter a constant torque value to apply an unchanging torque to the object throughout the entire analysis.
Table:
If a driving torque is to vary with time, enter the time history as a table of driving torque and time.
As with all table entries, the values can be retrieved from or saved to an Excel “.csv” file.
Resistive Torque
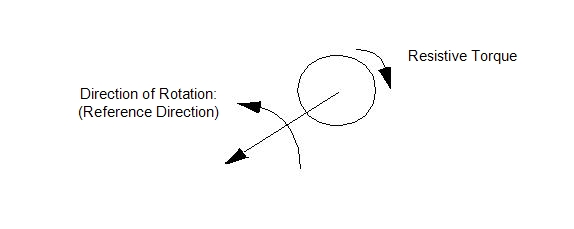
Applied resistive torque affects the rotation of the object by acting against its specified rotational direction, impeding its progress. A positive value of a resistive torque acts in the opposite direction of rotation; a negative value acts in the direction of rotation.
In addition to constant and tabular specification, resistive torque can be specified as a torsional spring. This is a virtual spring, and does not exist in the geometry model.
A resistive torque can be used to represent the force of gravity on an object if gravity is acting opposite the direction of travel. Specify a resistive torque that is the product of the weight of the object and the length of the moment arm connecting the centroid to the center of rotation.
The variation methods for Resistive Torque are described:
Constant:
Enter a constant torque value to apply an unchanging resistive torque to the object throughout the entire analysis.
Table:
If a resistive torque is to vary with time, enter the time history as a table of resistive torque and time.
As with all table entries, the values can be retrieved from an Excel “.csv” file or likewise saved to one.
Spring:
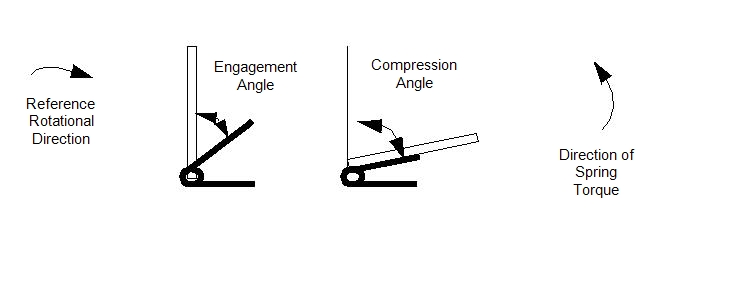
Four parameters are required to specify a torsional spring:
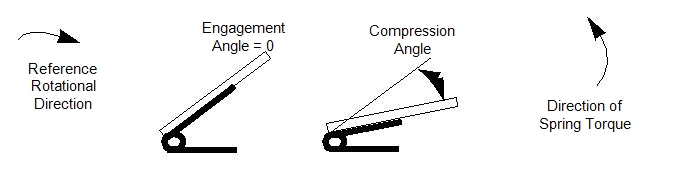
- Engagement Angle: the rotation before touching the spring
- Compression Angle: the rotation before fully compressing the spring (relative to the starting point). This is the limit of travel, and is considered a hard stop.
- Engagement Torque: the amount of torque the spring exerts at the engagement angle. (This is the spring pre-load. If none exists, enter 0).
- Compression Torque: the amount of torque the spring exerts at the compression angle.
Recall that the angular direction defined by the Axis of Rotation is the reference positive direction. Depending on the flow, the actual rotational direction may change. Note, however that the signs of applied torque and angular displacement values are defined by this rotational direction.
Because torsion springs are considered a resistive force, a spring force with a positive value will act in the direction opposite to the object’s reference rotational direction (it is impeding the forward progress of the object, therefore it is a resistance). Likewise, a negative spring torque acts in the object’s reference rotational direction. (The spring is aiding the forward progress of the object, and is hence acting not as a resistance but as a driver, so its sign is negative).
A positive spring angle is in the reference direction; a negative angle value is opposite to the reference direction.
The following diagrams describe setting up several scenarios involving torsional springs.
Note that all specified displacements act relative to the initial position specified with the Initial Position slider on the Motion task dialog.
If the object is not touching the spring at time = 0, then the configuration may appear as:
If the object is touching the spring at time=0, then the engagement angle is 0:
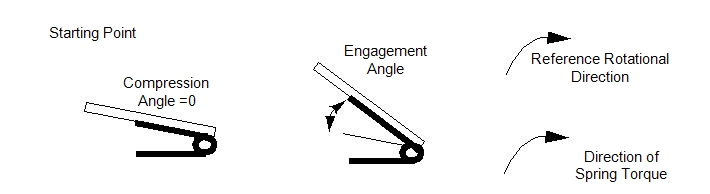
If at time = 0 the spring is fully compressed by the object, then the compression angle is zero, and the engagement angle is the angle to where the spring is no longer compressed:
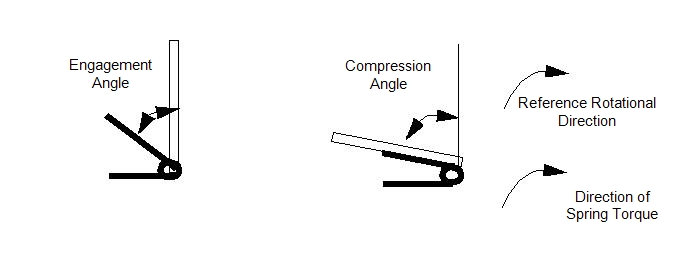
If the flow is such that the object rotates in an angle opposite of its reference angle to contact the spring, then the engagement and compression angles should be applied as negative values:
Note that only one torsional spring is allowed on a moving part. Because of this, multiple torsional springs acting in different directions cannot be applied to the same part.
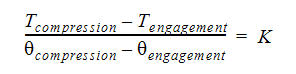
The relationship between the required parameters and the spring constant is given as: