アセンブリ拘束およびアセンブリ ジョイントはどちらも、コンポーネントの配置と許容可能な動作を決定する関係を作成します。
[拘束]および[アセンブリ]コマンドは、従来のコンポーネントの配置方法で、拘束を使用して徐々に自由度(DOF)を除去します。
[ジョイント]コマンドを使用して、コンポーネント関係の複雑さを低減します。ジョイントを使用してコンポーネントを配置し、モーションを完全に定義します。ジョイントとともに[ロック]および[保護]コントロールを使用することができます。これらのオプションは、ブラウザで接続を選択すると、右クリック メニューから使用できます。[ロック]は、すべての自由度を除去しますが、関連するコンポーネントが移動したときに、コンポーネントの位置を変更できます。[固定]も、すべての自由度を除去しますが、空間でのコンポーネントの位置を固定します。追加した関係が必要なモーションに違反する場合に警告するには、ジョイントで[保護]を使用します。
両方の拘束と接続関係に対して、モーション限界値の許容範囲を指定できます。
コンポーネントの配置のスタートアップ
- Inventor の旧リリースでは、アセンブリに配置する最初のパーツを固定します。最初のパーツの位置は、パーツの原点がアセンブリの原点に一致するように固定されます。他のコンポーネントに対してアンカーの役割を果すように、アセンブリの少なくとも 1 つのコンポーネントを固定することをお勧めします。必要なコンポーネントを固定するには、コンポーネントを配置するときに右クリック メニューを使用して、[原点に固定して配置]を選択します。
- アセンブリにコンポーネントを配置するときに右クリック メニューを使用して、X、Y、または Z 軸を中心に回転させて、初期方向を設定します。
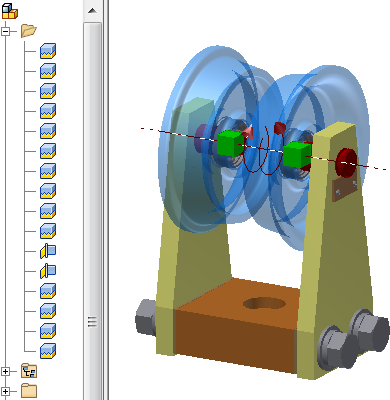
アセンブリ ジョイント
次の図では、2 つのアセンブリ ジョイント タイプ、[リジッド]および[回転]を使用して、コンポーネントを配置し、自由度を定義しています。[ジョイント]は、コンポーネントの位置と自由度を明示的に定義するため、一貫性のある予測可能な結果を得るために必要な接続が少なくてすみます。[リジッド]は最も一般的なジョイント タイプで、2 つの軸受のみが回転します。つまり、すべてのコンポーネントのアセンブリのモーションが適切に定義されているということです。必要な結果を得るために、拘束付きのジョイントを使用することができます。
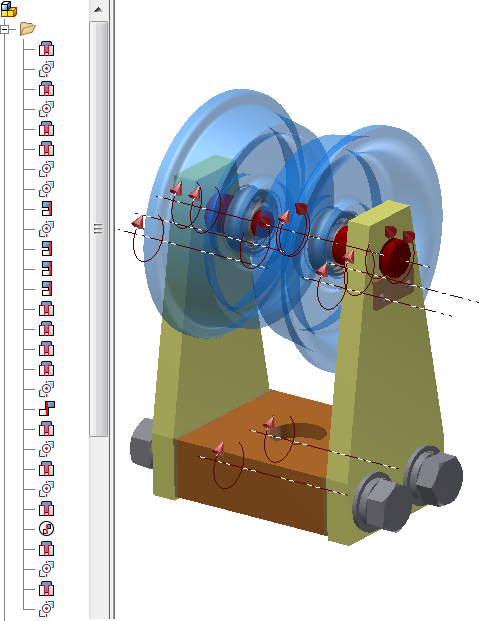
アセンブリ拘束
次の図では、メイト拘束、フラッシュ拘束、挿入拘束を使用して、コンポーネントを配置し、モーション範囲を定義しています。通常、拘束では、自由度を定義して、コンポーネントを配置するには、接続よりも多くの関係が必要となります。次の図の締結部品には、回転自由度が残っていることに注意してください。方向が重要でない場合、拘束の使用時に追加の自由度を用いるのが一般的です。必要な結果を得るために、ジョイント付きの拘束を使用することができます。
アセンブリ関係を作成する
[ジョイント]コマンド
[ジョイント]は、元の選択内容に基づいて、接続タイプを自動的に決定できます。また、ジョイント タイプを選択し、配置およびジョイントするオブジェクトを選択することもできます。関係の作成に加えて、ブラウザ名を変更したり、限界値を適用することができます。
ジョイントは、最初に選択したコンポーネントを 2 番目の選択に移動します。必要に応じて、最初のコンポーネントを移動できるように、既存の関係または固定状態が緩和されます。コンポーネントを適切に配置するために、ジョイントを適用する前に、ジョイントの効果をプレビューできます。
[拘束]コマンド
拘束の種類を選択して[拘束を指定]ダイアログ ボックスを更新し、拘束するオブジェクトを選択します。拘束の作成に加えて、ブラウザ名を変更したり、限界値を適用することができます。
コンポーネントを正確に配置するため、拘束を適用する前に結果をプレビューできます。拘束のタイプを選択して角度またはオフセットを設定すると、2 つのコンポーネントは拘束された位置に移動します。必要に応じて、拘束の設定を調整してから適用できます。
[アセンブリ]コマンド
拘束するオブジェクトを選択して、適用する拘束のタイプを選択します。ダイアログ ボックスではなく、ミニ ツールバーがグラフィックス ウィンドウに表示されます。アセンブリは、選択されたジオメトリに基づいて、自動的に有効な拘束タイプを選択します。たとえば、平面を選択すると、リストにメイト - メイト、メイト - フラッシュ、角度 - 有向角拘束タイプのみが表示されます。円形状エッジで最初の選択を行うと、挿入 - 反対および挿入 - 位置揃え拘束のみがリストに表示され、2 番目の選択は円形状エッジに制限されます。
[アセンブリ]コマンドは、最初に選択したコンポーネントを常に 2 番目の選択へ移動します。必要に応じて、最初のコンポーネントを移動できるように、既存の拘束または固定状態が緩和されます。[アセンブリ]コマンドを終了すると、新しい拘束および既存の拘束が計算されます。矛盾がある場合は、[アセンブリ拘束管理]ダイアログ ボックスが表示され、拘束を省略または削除できます。この作業手順は、そのコンポーネントにどのような拘束が適用されているかわからないときにコンポーネントの位置を変更する場合に使用します。コンポーネントの位置を変更しながら、拘束の矛盾を解決できます。
[アセンブリ]コマンドでは、一部の拘束タイプ(モーション、移動、角度 - 非有向角、角度 - 直接参照ベクトル)がサポートされていません。また、拘束名を変更することや、限界値を適用することができません。拘束は作成後に編集して、設定を変更することができます。
位置の限界値
限界値には指定された値を使用し、移動または回転するコンポーネントのモーションの許容範囲を定義します。拘束とジョイントのサポートの両方が制限されます。限界値のある関係は、ブラウザで +/- の記号が付けられて区別されます。
動作するパーツのモーションをシミュレーションする
動作するパーツのメカニズムを設計している場合は、モーションをシミュレーションすることがプロトタイプ作業の主要な作業になります。適切な方法を決定する場合には、次の項目について考慮してください。
- 拘束またはジョイントの限界値を使用して、動作または回転の許容範囲を定義します。
- モーション拘束では、定義済みの回転またはラック ピニオン比を使用して、コンポーネント間の動作を表現します。モーション拘束は、適切な歯数比などの特性を確認する軽量な手法です。
- 接触セットは、コンポーネント間に物理的な接触を使用して動作を制限します。干渉がある場合、コンポーネントは動作できません。この方法には、モーション拘束よりも多くのコンピュータ処理が必要になります。
- ダイナミック シミュレーションは、質量、摩擦、慣性マトリクス、荷重定義などの物理プロパティを使用して、実際の環境でのコンポーネントの動作や特性に関する情報を指定します。Inventor Simulation 製品を使用して、設計での実際の荷重の影響や結果を解析します。この方法には、コンピュータ処理が最も多く必要ですが、結果の精度も最も高くなります。Inventor Studio へのリンクによって、動作のリアルなアニメーションを録画できます。
- Inventor Studio によって、機構の動作の作成に、アセンブリ関係のアニメーションやポジション リプレゼンテーションを使用できるようになります。リアルで、実際の動作を再現するイメージやビデオを出力することが、Inventor Studio の主要な用途です。
レイアウト拘束
レイアウト拘束は、[コンポーネントを作成]を実行する際に作成されます。レイアウト拘束は、レイアウトと、レイアウトから派生したパーツ プッシュとの間の関係を定義します。レイアウト拘束は、レイアウトの 3 つの主要な平面と派生パーツとの間のフラッシュ拘束と、レイアウトの z 軸と派生パーツとの間のゼロ度の角度拘束で構成されます。
- [レイアウト平面に拘束] - コンポーネントをレイアウト平面に固定オフセットで拘束し、コンポーネントがレイアウト平面に対して平行に移動できるようにします。このオプションをオンにしない場合、コンポーネントはレイアウト平面に対して垂直に(レイアウト パーツの Z 軸に沿って)移動できます。
- [レイアウト コントロール位置] - レイアウト パーツによって、アセンブリ コンポーネントの X と Y の位置をコントロールします。
- [アセンブリ コントロール位置] - コンポーネントを、その拘束と自由度に基づいて移動できます。この動作は 2D または 3D に対して拘束できます。
レイアウト拘束は、スケルトン モデリングの際に便利な特定の動作を提供します。
レイアウト拘束の既定の動作は、スケッチ拘束の関係性と、コンポーネントを作成時に選択するオプションに基づいて初期化されます。コンポーネントの動作を変更するには、ブラウザでコンポーネントのインスタンスを右クリックし、そのメニューから[レイアウト拘束]を選択して、適切な配置オプションを選択します。
レイアウト拘束を修正して、目的の動作を達成することができます。ただし、[コンポーネントを作成]のワークフロー以外で新しいレイアウト拘束を配置することはできません。
置換するコンポーネントの拘束を保持する
コンポーネントを置換した場合に拘束を保持するには、次の 2 通りの方法があります。
- 既存のコンポーネントと置換するコンポーネントを共通のパーツから作成する([コピーを名前を付けて保存]オプションを使用)
- iMate を使用する
iMate とは、対になる拘束をパーツに定義したもので、パーツがアセンブリに配置されるたびにそのパーツが相手のコンポーネントとどのようにフィットするかを定義します。
ブラウザでコンポーネントを右クリックして[iMate を推定配置]を選択すると、既存のアセンブリ拘束が iMate 定義に変換されます。コンポーネントの編集、修正時に iMate を作成することもできます。
複雑なアセンブリ内の関係を作成する方法
複雑なアセンブリのメンバの配置を単純化するには、小さなアセンブリをいくつか作成し、必要に応じて関係を適用して、それぞれを個別のファイルに保存します。この方法により、サブアセンブリは上位のアセンブリで単一のユニットとして配置できます。
パーツをサブアセンブリにグループ化すると、複数のアセンブリでパーツを簡単に使用できるようになります。