サブアセンブリは、1 つの設計で複数回使用されることがしばしばあります。各インスタンスが異なる位置にあると想定できるように、サブアセンブリの各インスタンスをフレキシブルにします。
注: サブアセンブリまたはサブアセンブリ内のパーツがアダプティブの場合、フレキシブルの設定を有効にすると、自動的にアダプティブ機能がオフになります。
- 必要な自由度が指定されたアセンブリを作成します。アセンブリを上位レベルのアセンブリに配置します。
- グラフィックス ウィンドウまたはブラウザで、配置したサブアセンブリを右クリックして[フレキシブル]を選択します。サブアセンブリで許容されている動きの自由度は親アセンブリでも使用できます。ブラウザには、フレキシブル状態を示すアイコンがサブアセンブリに表示されます。
- 必要に応じて、サブアセンブリの選択とフレキシブル化を続行します。
- [保存]をクリックして、アセンブリ ファイルのフレキシブル状態を保存します。個々のコンポーネント ファイルは影響を受けません。
フレキシブル状態を解除するには、フレキシブル サブアセンブリを右クリックし、チェックボックスをオフにします。
ヒント:
- フレキシブルを有効にしても親アセンブリで必要な動きが実現できない場合、サブアセンブリを開いて関係を確認してください。
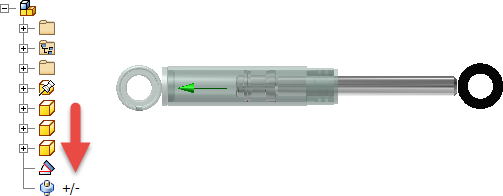
- 接触セットの代わりにジョイントまたは拘束の限界値を使用して、サブアセンブリで許容される移動を設定します。接触セットでは計算が必要ですが、限界値の場合は必要ありません。たとえば、次のイメージの円柱状ジョイントは、0 mm ~ 116 mm の範囲で移動を制限することができます。このルールは、フレキシブルを親アセンブリに適用すると強制的に適用されます。その際、接触セットを有効にしたり、余分な計算時間を消費することはありません。