다음과 같은  사용자 정의 프로빙 방법을 사용할 수 있습니다.
사용자 정의 프로빙 방법을 사용할 수 있습니다.
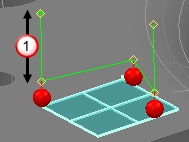
최적 — PowerInspect가 프로브 패스에서 첫 번째 및 마지막 프로빙된 위치에 대한 안전 이동을 생성합니다. 각 안전 이동은 피쳐의 위치(또는 서피스 측정 그룹의 첫 번째 또는 마지막 포인트의 위치)를 측정하고 피쳐의 방향(또는 서피스 측정 그룹의 첫 번째 또는 마지막 포인트의 벡터)을 따라 측정 대화상자에 지정된 안전 높이  에 해당하는 거리만큼 이동하여 만듭니다.
에 해당하는 거리만큼 이동하여 만듭니다.
프로브는 첫 번째와 마지막 프로빙된 위치 사이에서 각 위치 다음의 후퇴 거리만큼 이동합니다. 예를 들면 다음과 같습니다.
자동 방향 버튼을 사용할 수 있지만 선택하지 않은 경우  , PowerInspect는 기계의 Z 축을 따라 프로브 방향을 지정합니다.
, PowerInspect는 기계의 Z 축을 따라 프로브 방향을 지정합니다.
자동 방향 버튼을 선택하는 경우  , PowerInspect는 프로브 패스에서 첫 번째 접촉 포인트의 서피스 법선에 따라 프로브(프로브 헤드 사용)의 방향을 지정합니다.
, PowerInspect는 프로브 패스에서 첫 번째 접촉 포인트의 서피스 법선에 따라 프로브(프로브 헤드 사용)의 방향을 지정합니다.
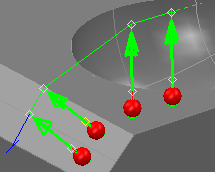
SurfaceNormal — 이 방법은 최적과 동일합니다. 단, PowerInspect가 각 접촉 포인트에서 서피스 법선을 사용하여 프로브 패스의 모든 위치에 대해 안전 이동을 생성한다는 점이 다릅니다. 이 방법은 서피스 측정 그룹에만 적용됩니다.
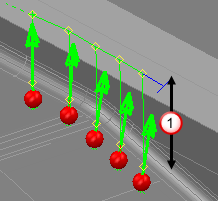
SafePlane — 이 방법은 프로브를 프로빙된 각 위치 사이의 안전 평면으로 이동합니다.
서피스 측정 그룹의 경우, 그룹에서 가장 높은 포인트 위의 안전 높이 에 평면이 배치됩니다. 예를 들면 다음과 같습니다.
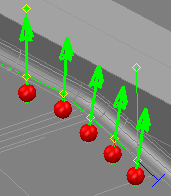
설정을 변경하려면 측정 대화상자에서 파라메터  버튼을 클릭합니다. PointSafe 파라메터를 비활성화하면 안전 평면 이동으로 복귀가 제거됩니다. 예를 들면 다음과 같습니다.
버튼을 클릭합니다. PointSafe 파라메터를 비활성화하면 안전 평면 이동으로 복귀가 제거됩니다. 예를 들면 다음과 같습니다.
자동 방향 버튼을 선택 취소하는 경우 , PowerInspect는 기계의 Z 축을 따라 프로브 방향을 지정합니다.
자동 방향 버튼을 선택하는 경우 , PowerInspect는 프로브 패스에서 첫 번째 접촉 포인트의 서피스 법선에 따라 프로브(프로브 헤드 사용)의 방향을 지정합니다.
TeachAndLearn — 이 방법은 원래 TeachAndLearn 프로브 패스를 유지하면서 이전 버전의 PowerInspect와 호환되는 기능을 제공합니다. 이 방법은 프로브의 진입 및 후퇴 거리만 사용하며 TeachAndLearn 함수를 사용하여 만든 프로브 패스가 포함된 파일에만 적용됩니다.
ZAxisSafe — 이 방법은 서피스 법선을 따라 후퇴 거리를 후퇴시키는 프로브 패스를 생성한 다음, 기계의 Z 축에서 안전 높이 거리만큼 후퇴합니다. 경사진 평면 또는 수직 평면에서 피쳐를 프로빙하려고 할 때 장애물로 인해 프로브가 서피스 법선을 따라 후퇴하지 못하는 경우에 사용합니다.
StylusVectorSafe — 이 방법은 서피스 법선을 따라 후퇴 거리를 후퇴시키는 프로브 패스를 생성한 다음, 프로브 벡터를 따라 안전 높이 거리만큼 후퇴합니다. 경사진 평면 또는 수직 평면에서 피쳐를 프로빙하려고 할 때 장애물로 인해 프로브가 서피스 법선을 따라 후퇴하지 못하는 경우에 사용합니다.
Fallback — 이 방법은 원래 방법을 현재 구성에서 작동하는 방법으로 대체합니다. 대체 방법이 최적이 아닐 수 있으므로 측정 순서를 재생하기 전에 다른 방법을 선택해야 합니다. Fallback은 선택할 수 없습니다. 이 방법은 현재 선택한 프로브에서 원래 방법을 사용할 수 없거나 이 버전에서 사용할 수 없는 프로빙 방법을 사용하여 PowerInspect의 다른 버전에서 아이템을 지정한 경우에만 사용됩니다.
이러한 방법의 5축 버전에서는 접점 간 5축 이동을 생성합니다. 측정 장치가 5축 이동을 지원하지 않는 경우 이러한 옵션은 3축 방법으로 처리됩니다.