Этот пример показывает, как построить локальную СК по текущему положению станка. Локальная СК совмещается с осью инструмента и положением шпинделя.
Это может быть полезным, если нужно вставить локальную СК между двумя многоосевыми траекториями в NC-файле для лучшего доступа (5-осевой переход). Если вы приостановили симуляцию станка после первой траектории и вручную перемещаете станок в нужную ориентацию, чтобы получить доступ к инструменту, можно затем создать локальную СК.
- Создайте NC-файл, который содержит больше одной траектории.
- Вы знаете, что между первой и второй траекторией необходим 5-осевой переход. Однако вы не знаете точную ориентацию этой рабочей плоскости, поэтому создайте новую рабочую плоскость, выбрав Создать локальную СК в контекстном меню ветви Локальные СК:
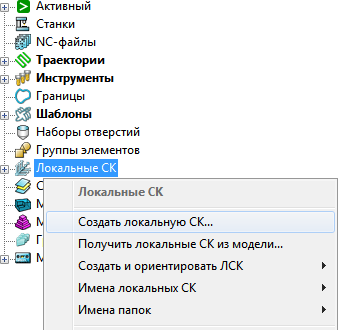
- На вкладке «Редактор ЛСК» > панель «Локальная СК» введите Имя, например Placeholder, и нажмите «Редактор ЛСК» > панель «Готово» > «Принять», чтобы ее создать.
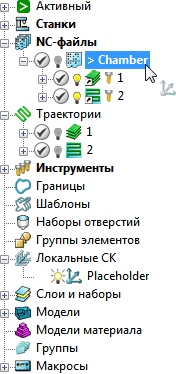
- Перетащите рабочую плоскость в положение между двумя траекториями NC-файла:
- Выберите вкладку «Станок» > панель «Файл» > «Импорт», чтобы загрузить станок.
- Убедитесь, что первая траектория активна.
- В контекстном меню отдельной траектории выберите Симуляция с начала.
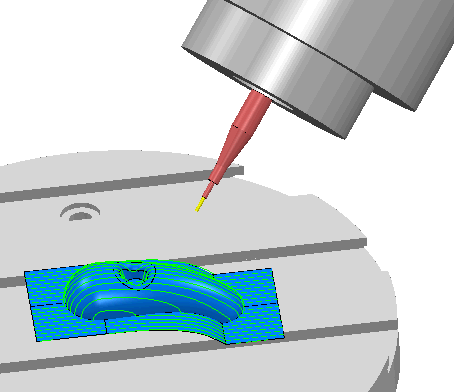
- Переместите станок в конец первой траектории, используя вкладку «Симуляция» > «Элементы управления симуляцией» > «Шаг вперед» (или используйте клавиши управления моделированием).
- Выберите вкладку «Симуляция» > вкладка «Положение» > «Станок», чтобы открыть диалоговое окно Положение станка.
- Используйте слайдеры осей в диалоге Положение станка, чтобы вручную перемещать станок в нужное положение для движения перехода.
- В контекстном меню отдельной локальной СК выберите Редактор ЛСК.
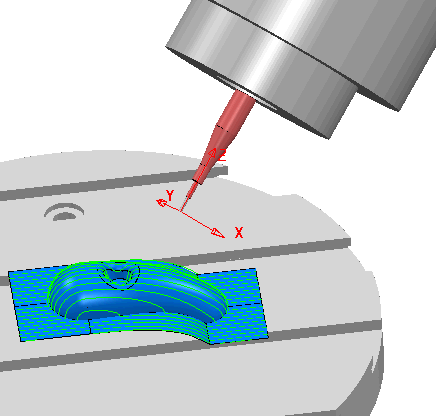
- Выберите вкладку «Редактор ЛСК» > панель «Выровнять» > «Выровнять» > «По инструменту и перенос».
- Выберите вкладку «Редактор ЛСК» > панель «Готово» > «Принять».
Локальная СК Placeholder теперь имеет нужную ориентацию:
- Закройте диалог Положение станка.
Прим.: Такая техника позволяет конструировать траекторию, соответствующую заданной ориентации станка, а не пытаясь узнать ориентацию станка для данной траектории.
Прим.: Этот метод также можно использовать для задания ориентации станка при 3+2-осевой обработке и задания ограничений для многоосевого станка путем перемещения станка к его пределам, создав рабочую плоскость и выбрав Базирование по инструменту. Затем из Свойств, доступных из контекстного меню отдельной локальной СК, можно показать углы Элевации и Азимута. Эти углы аналогичны углам на вкладке Ограничения в диалоге Направление оси инструмента.
Прим.: Это также работает при стандартной анимации без загрузки станка.