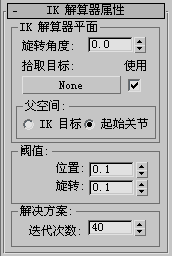
在此处的是 HI IK 解算器的其他控件。“IK 解算器平面”由此处的“旋转角度”所控制,它可以使用目标对象直接地设置动画。
-
选择 HI IK 链的末端效应器。 >
 “运动”面板 > “参数”按钮 > “IK 解算器属性”卷展栏
“运动”面板 > “参数”按钮 > “IK 解算器属性”卷展栏
在“父空间”组中,可以将 IK 目标或起始关节选作旋转角度的父空间来使用。如果选择了“IK 目标”(默认设置),那么链的“旋转角度”就在它目标的父空间中定义。如果选择了“起始关节”,那么“旋转角度”将会相对于该起始关节的父空间。这两个选项可以更好的控制带有两个 HI IK 解算器链上的旋转角度。例如,链上半部分的第一个解算器可以使用“起始关节”的“父空间”中的“选转角度”,而链下半部分的第二个 IK 解算器可以使用“IK 目标”的“父空间”。在本例中,一个链上“旋转角度”的改变不会改变另一个链的方向。
在“阈值”和“解决方案”组中,可以细化 IK 解决方案。“位置阈值”使用单位设置了目标可以移离末端效应器的最远距离,“旋转阈值”也以相同的方式设置了角度极限。
“解决方案”组中的“迭代次数”是 IK 解决方案在放弃之前所尝试的最大次数。
如果 IK 动画看起来有些抖动,可试着将迭代次数增加到 200。增加迭代次数将降低计算速度,但会产生较好的结果。
旋转角度操纵器
![]() 可以用这个卷展栏中的微调器来调整旋转角度,也可以用操纵器来调整旋转角度。要使用操纵器进行调整,请启用选择并操纵。旋转角度操纵器在视口中显示为控制柄。
可以用这个卷展栏中的微调器来调整旋转角度,也可以用操纵器来调整旋转角度。要使用操纵器进行调整,请启用选择并操纵。旋转角度操纵器在视口中显示为控制柄。
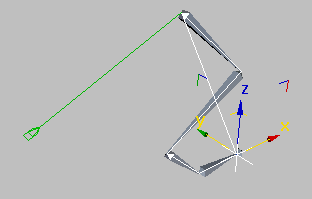
旋转角度操纵器。

旋转角度操纵器。
当鼠标移到操纵器上时,它会变成红色。此时,可以拖动操纵器来更改旋转角度。在进行此操作时,会激活“自动关键点”按钮。
也可以使用目标对象来设置旋转角度的动画。为目标拾取一个对象,然后设置该对象的动画就可以设置旋转角度的动画。
旋转角度操纵器是标准的平面角度操纵器。HI 解算器有它自己的用以显示该操纵器的控件。该控件在“IK 显示选项”卷展栏上。
过程
要增加 IK 解决方案的精度,请执行以下操作:
-
 选择 HI IK 链中的目标。
选择 HI IK 链中的目标。 - 在“IK 解算器属性”卷展栏中,将解决方案组中的“迭代次数”增加至 200。
-
 播放或
播放或  渲染该动画。
渲染该动画。 - 也可以将“位置阈值”和“旋转阈值”调整到一个较小的值。
界面
“IK 解算器平面”组
- 旋转角度
- 控制解算器平面,以确定人类肢体中膝部或肘部的方向。启用“显示选项”卷展栏中的“旋转角度显示”,然后启用“操纵模式”,就可以在视口中对“旋转角度”进行操纵。当旋转角度操纵器在视口中显示时,可以交互式地设置操纵柄的动画以设置解算器平面的动画。
- 拾取目标
- 可以选择另一个用以设置“旋转角度”动画的对象。
- 使用
- 启用或禁用“目标”的使用。
- 父空间
- 定义用于确定“旋转角度”相对值的空间。在链上对多个解算器使用此选项,使某个链上的旋转角度操纵器不会影响到其他的链。有关详细信息,请参见白皮书:HI IK 解算器的旋转角度。
- IK 目标定义相对于 IK 目标的旋转角度父空间。
- 起始关节定义相对于起始关节的旋转角度父空间。
“阈值”组
用以定义系统计算的公差。
- 位置
-
使用单位来设置目标能移离末端效应器的最远距离。使这些数字保持较低的值。
- 旋转
-
使用单位来设置目标能偏离末端效应器的最大角度。将这些数字保持较低的值,以获得最佳的效果。
注意,调整“HI 解算器”和“IK 肢体解算器”上的“旋转阈值”没有任何的效果。这取决于插件解算器是否支持 IK 解决方案中的旋转分量。
“解决方案”组
用以控制动画的精度。当 IK 解决方案产生的动画看起来比较粗糙并会抖动时,可以增加迭代次数。
- 迭代次数
- IK 解决方案为了找到目标和末端效应器位置之间的最佳匹配而尝试的次数。如果产生跳动的动画,可以增加此值。